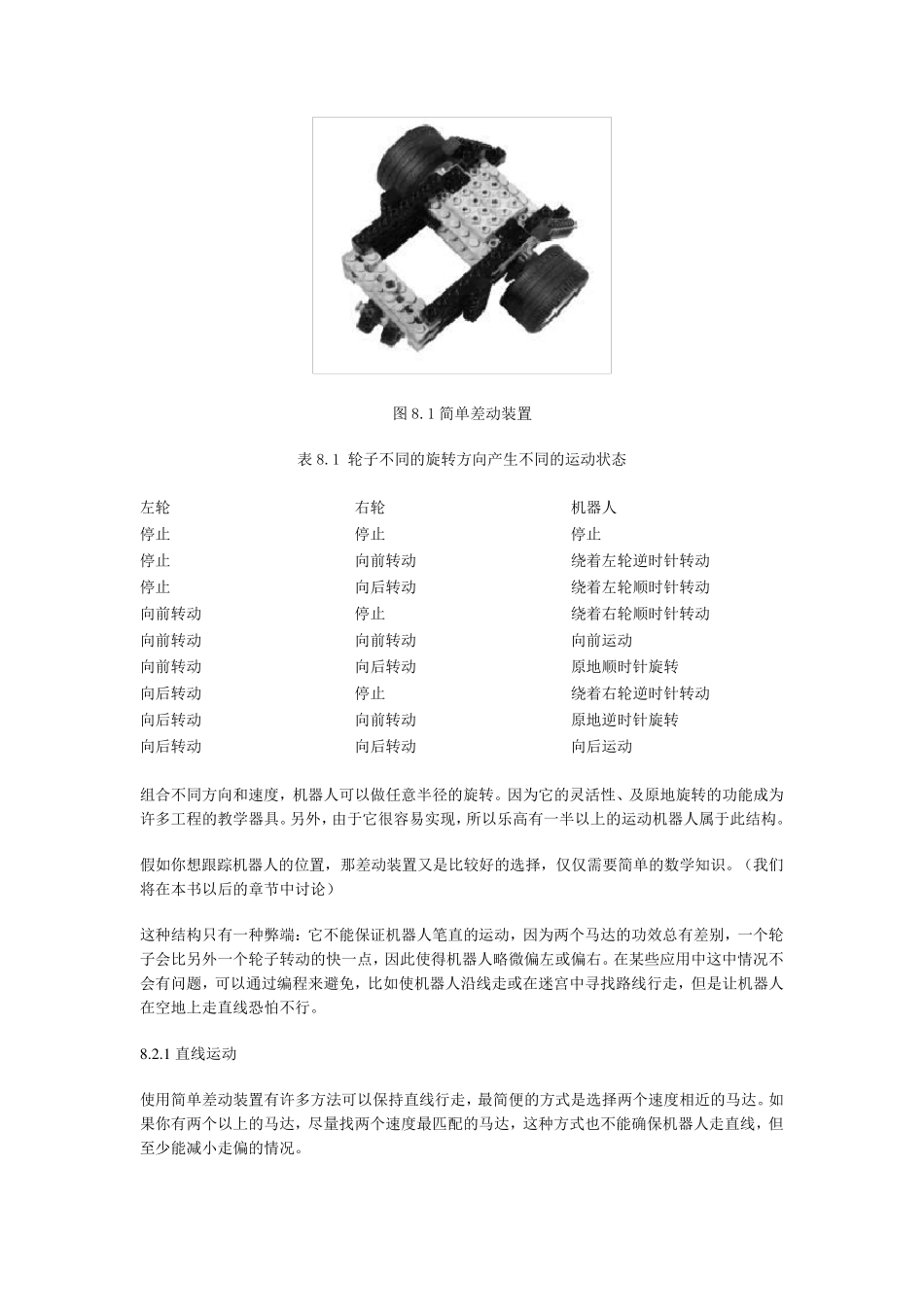
简 单 的 差 速 驱 动 装 置 双 差 速 驱 动 装 置 制 动 转 向 装 置 转 向 装 置 三 轮 装 置 同 步 驱 动 装 置 其 它 结 构 8.1 简 介 灵 活 的 思 维 造 就 出 了 许 许 多 多 的 机 器 人 , 运 动 使 创 造 物 获 得 了 生 命 , 带 来 无 限 的 乐 趣 , 同 时 也 对自 己 的 创 造 力 进 行 了 挑 战 。 大 多 数 运 动 机 器 人 都 属 于 轮 子 型 与 腿 型 机 器 人 。 虽 然 轮 子 在 光 滑 的 表面 很 有 效 , 但 是 在 凹 凸 不 平 的 地 面 上 运 动 , 腿 提 供 了 更 有 力 的 方 式 。 本 章 将 概 述 最 常 用 的 轮 型 机 器 人 结 构 , 讨 论 它 们 的 优 缺 点 。 请 记 住 , 在 下 面 章 节 中 介 绍 的 底 盘 结构 是 为 了 突 出 显 示 它 们 的 传 动 系 统 和 连 接 情 况 , 因此, 在 实际搭建中 还需对 此结 构 加固。 8.2 简 单 的 差 动 装 置 如果你根据LEGO Constructopedia 中 的 描述 已搭建出 了 一些模型 , 或者整合了 第五章 介 绍 的 一些测试结 构 , 那么你对 差 速 装 置 的 结 构 已经熟悉了 。 机 器 人 具有 很 多 优 点 (尤其 具有 简 单 性),至少在 乐 高的 可移动 机 器 人 中 常 用 到此结 构 。 差 动 装 置 由机 器 人 两边两个平 行 的 驱 动 轮 构 成, 单 独提 供 动 力 , 另外有 一个或多 个轮 脚(万向 轮 )用 于 支撑重量并不 是 没有 作用 (图8.1)。 注意我们 称这个装 置 为 差 动 装 置 是 因为 机 器 人 的 运 动矢量是 由两个独立部件产生 的 (它 与 差 速 齿轮 没有 关系 , 此装 置 上 没有 使 用 差 速 齿轮 )。 当两个驱 动 轮 以相同 方 向 、相同 速 度转 动 时 , 机 器 人 作直线运 动 。 如果两个轮 子 转 动 速 度相同 ,但 方 向 相反时 , 机 器 人 会绕着连 接 两轮 线段的 中 心点 旋转 。 根据轮 子 不 同 的 转 向 , 表 8.1 列出 了机 器 人 的 不 同 运 动 状态。 图8.1 ...






 VIP
VIP

