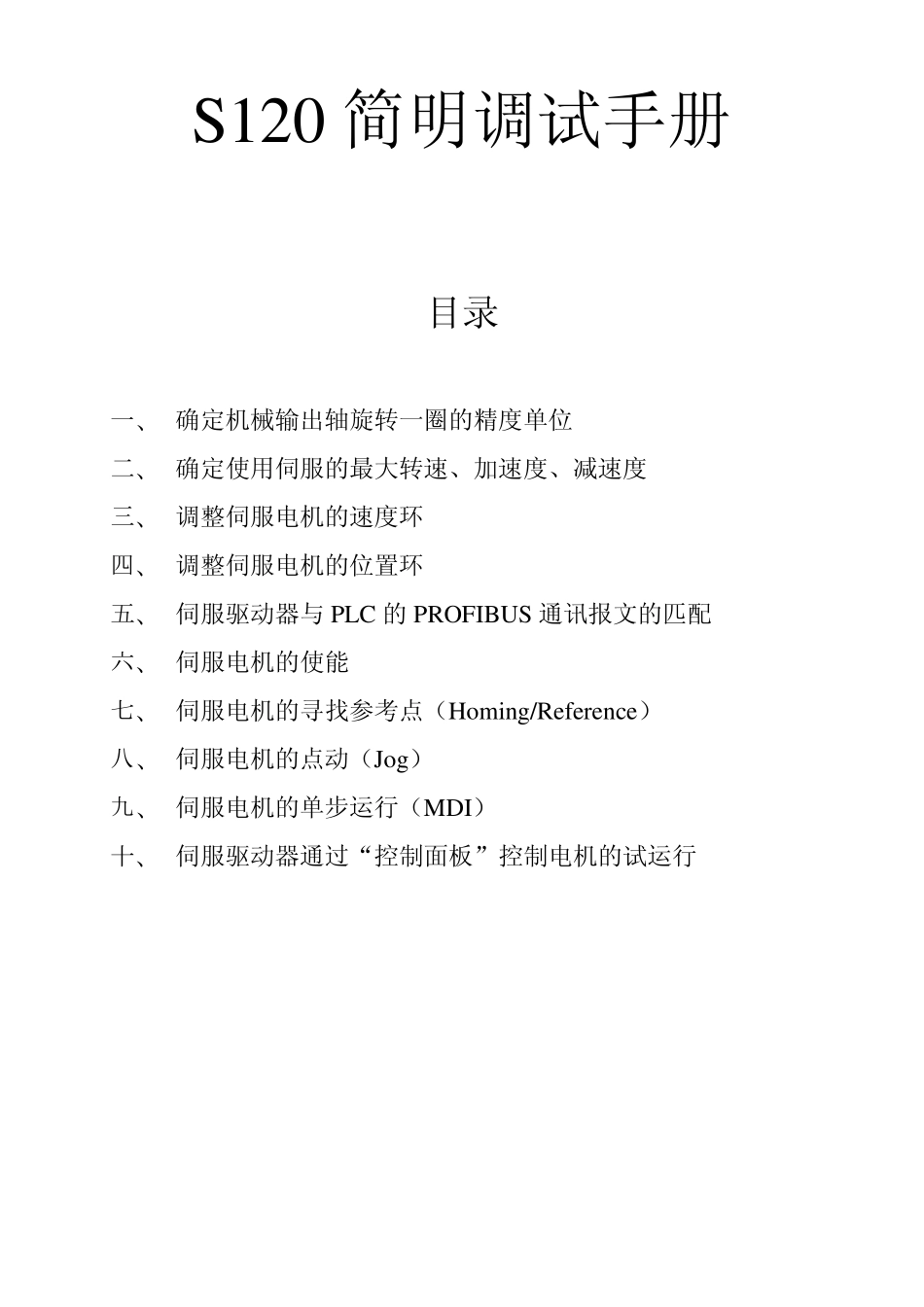
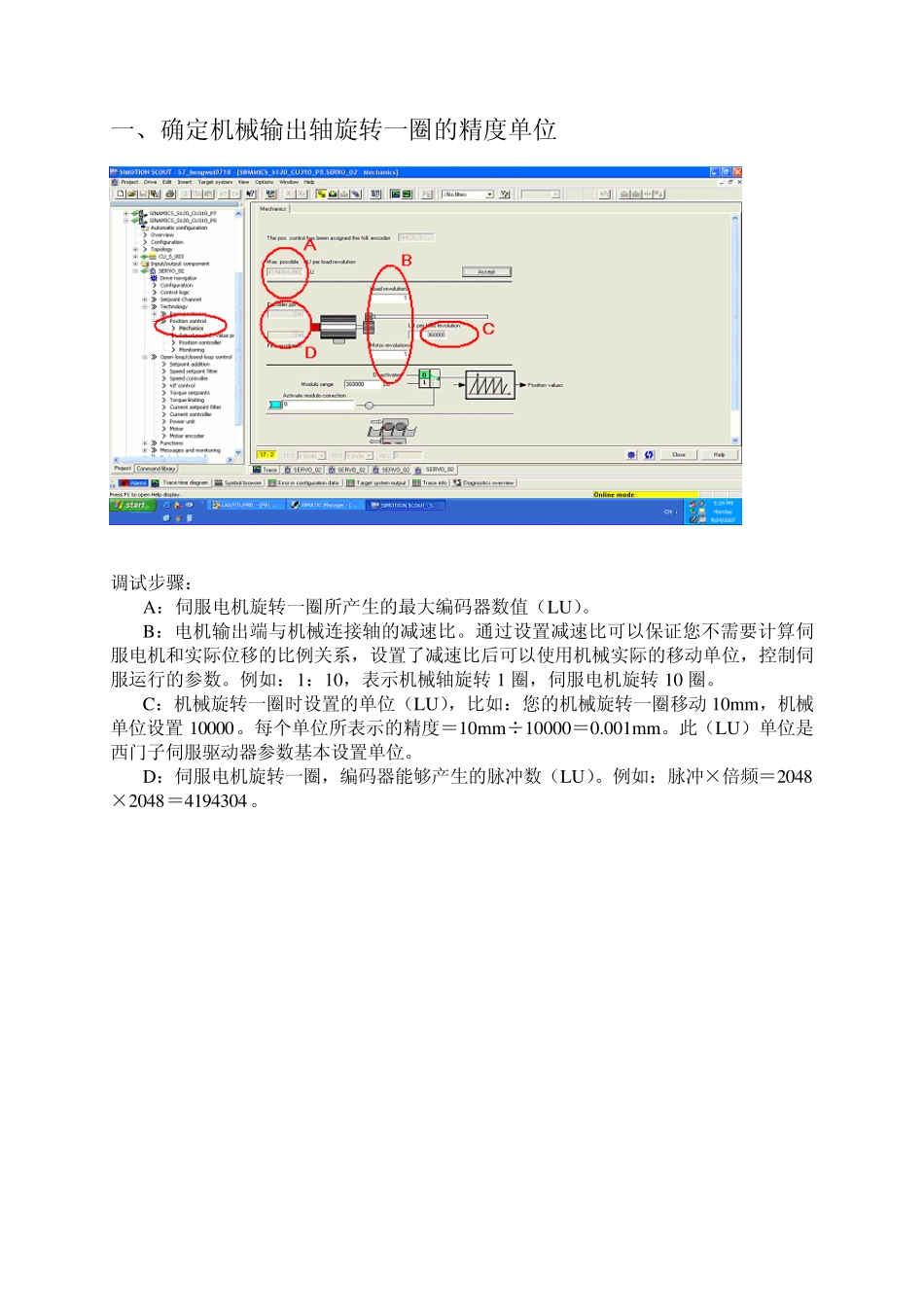
S120 简明调试手册 目录 一、 确定机械输出轴旋转一圈的精度单位 二、 确定使用伺服的最大转速、加速度、减速度 三、 调整伺服电机的速度环 四、 调整伺服电机的位置环 五、 伺服驱动器与PLC 的PROFIBUS 通讯报文的匹配 六、 伺服电机的使能 七、 伺服电机的寻找参考点(Homing/Reference) 八、 伺服电机的点动(Jog) 九、 伺服电机的单步运行(MDI) 十、 伺服驱动器通过“控制面板”控制电机的试运行 一、确定机械输出轴旋转一圈的精度单位 调试步骤: A:伺服电机旋转一圈所产生的最大编码器数值(LU)。 B:电机输出端与机械连接轴的减速比。通过设置减速比可以保证您不需要计算伺服电机和实际位移的比例关系,设置了减速比后可以使用机械实际的移动单位,控制伺服运行的参数。例如:1:10,表示机械轴旋转1 圈,伺服电机旋转10 圈。 C:机械旋转一圈时设置的单位(LU),比如:您的机械旋转一圈移动10mm,机械单位设置10000。每个单位所表示的精度=10mm÷10000=0.001mm。此(LU)单位是西门子伺服驱动器参数基本设置单位。 D:伺服电机旋转一圈,编码器能够产生的脉冲数(LU)。例如:脉冲×倍频=2048×2048=4194304。 二、确定使用伺服的最大转速、加速度、减速度。 调试步骤: A:伺服电机每分钟能够旋转的数值。例如:10000×1000LU/min。如果机械轴旋转1 圈需要 10000LU,则此参数表示:伺服每分钟旋转10000 000LU,即 1000 转/分钟。 B:伺服电机每S2 最大加速度。例如:5000 000LU/ S2,表示每秒可以移动 5000 000LU距离。如果机械单位 10000LU,表示每秒可以加速0.5 圈。 C:伺服电机每S2 最大减速度。 三、调整伺服电机的速度环。 调试步骤: A:伺服电机速度环 P 值。西门子伺服驱动器开放电机速度的 P ID 调节给用户使用,此数值表示伺服电机在速度环控制时的加速增益刚性。此数值太小则伺服电机加速没有力量,速度变化时调节缓慢。数值太大时,伺服电机会产生速度环的增益振荡,产生啸叫声。一般调节方法是:逐渐增加参数值,直到产生啸叫声,然后下降到不产生啸叫声为止。 B:伺服电机的积分时间。积分时间短,则电机速度变化缓慢,但是电机速度变化平稳;积分时间长,则电机速度变化迅速,但是容易产生速度超调现象。 四、调整伺服电机的位置环。 调试步骤: A:伺服电机位置环 P 值。西门子伺服驱动器开放位置的 P ID 调节给用户使用,此数值表示伺...





 VIP
VIP

