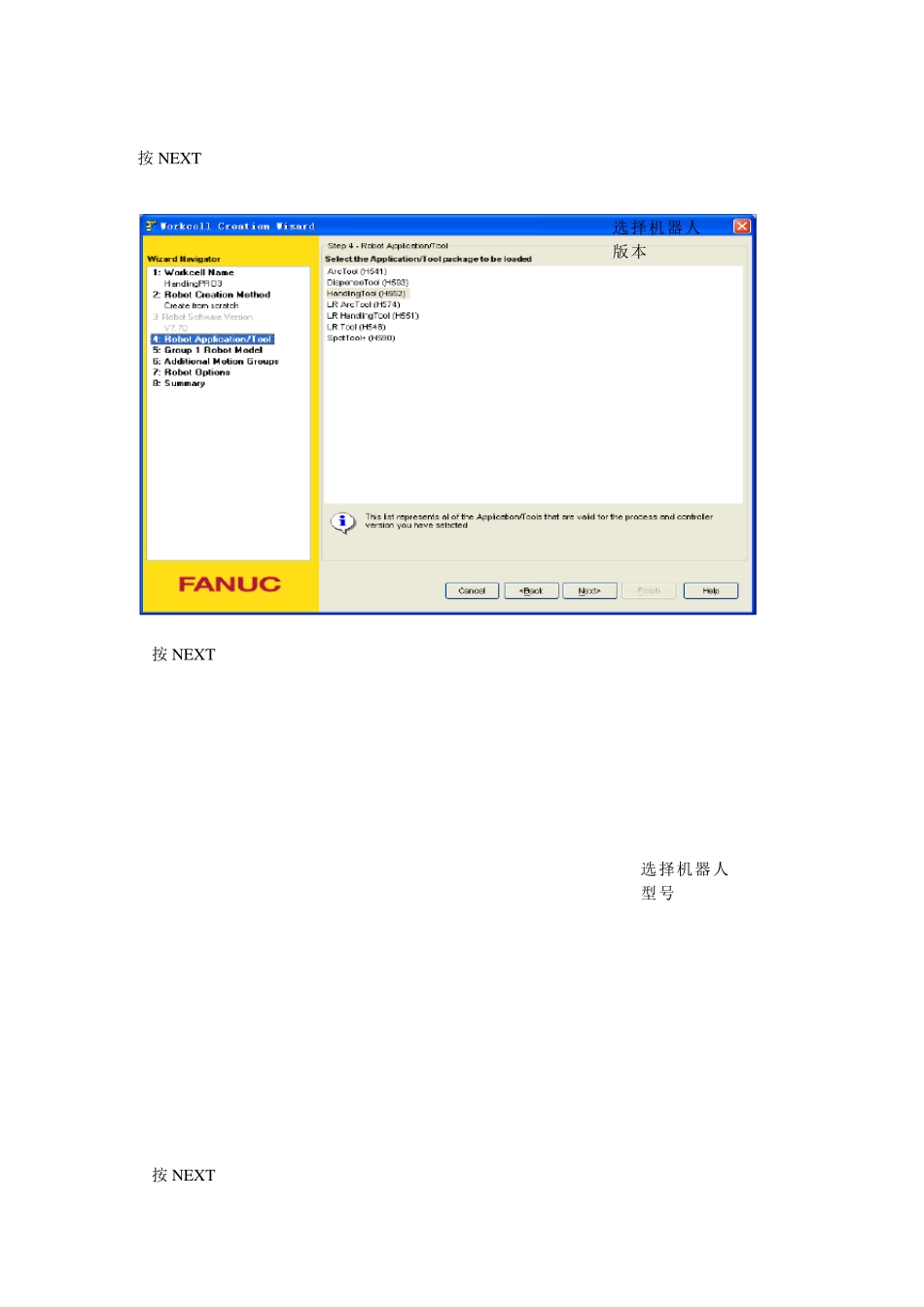
Robogu ide 离线编程及程序导入 一、创建 robogu ide 工程文件。 指定工程名 按 NEXT 新规作成 用 以 前 的 备 份 作用现在连线中的机器人作成 按NEXT 选择机器人版本 按NEXT 选择机器人型号 按NEXT 按NEXT 选择功能 选择语言 选择记忆卡 选择 2; 按 NEXT 按 FINISH 选择2 ; 选择2 ; 完成后进入机器人开始状态画面 二、 离线编程生成程式; 在 robotgu ide 中,客户产品文件使用 IGS 文档。用 part 的形式导入到 robotgu ide 中。如 下图: 添加产品档 工件 治具 机器人控制 1、在 robotgu ide 中添加一个箱子作为治具: 2、修改箱子的位置及大小,按 Apply 使箱子到达理想的位置,如下图 按 OK 键结束 3、添加客户产品工件,如下图: 添加箱子 箱子的位置 箱子尺寸 按OK 键结束 4、添加工件到治具上: 用鼠标双击 robotgu ide 中的箱子,出现对话框,点击 part 进入此栏对话框: 在 part1 前的方框打勾,按Apply 应用后,再在 Edit part offset 方框前打勾对产品工件进行位置设定。如下图: 编辑完成后按Ap p ly ——OK 结束。 5、添加刀具:工具坐标设置及用户坐标的建立。 编辑TOOLING 刀具位置 刀具尺寸 位置的变更 6、TOOL(工具)坐标设定: 编辑完成后按Ap p ly ——OK 结束。 位置变更有效 现在坐标系位置 生成用户坐标系:按“Ctrl+Alt”键,鼠标指向产品的中点。如下图: 单击鼠标左键,机器人的 TCP 点就会移动到产品的中点。如下两图: 按示教器“MENU”键——选择“6 SETUP”——“FRAMES”进入坐标系设定画面。如下图: 按“F3”选择坐标系方式 选择用户坐标系。 选择坐标系的方法。 按 F2 键 7、刻画路径生成轨迹: 用鼠标点击 此处,出现如下对话框。 选择 3 点法示教 示教原点、X方向、Y 方向分别按SHIFT+F5记录。 点击对话框中的“Edge line”对治具上的产品进行画线。最后一点以双击结束,画线完成后出现如下图对话框: 用鼠标点击只治具上的part,对话框有灰色变成有效色。 TP 程序名 治具程序名 TP 程序名 TP 程序名 开始的动作命令 程序的速度 动作的状态 设定完成后按Ap p ly 套用结束。 以上设定完成后按Apply 套用,用鼠标点击对话框上的“General”一栏,如下图: 面 对垂 直(法线) 圆弧检测 坐标方向与进行方向一致 坐标方向固定 进行方向对直交 进行...







 VIP
VIP

