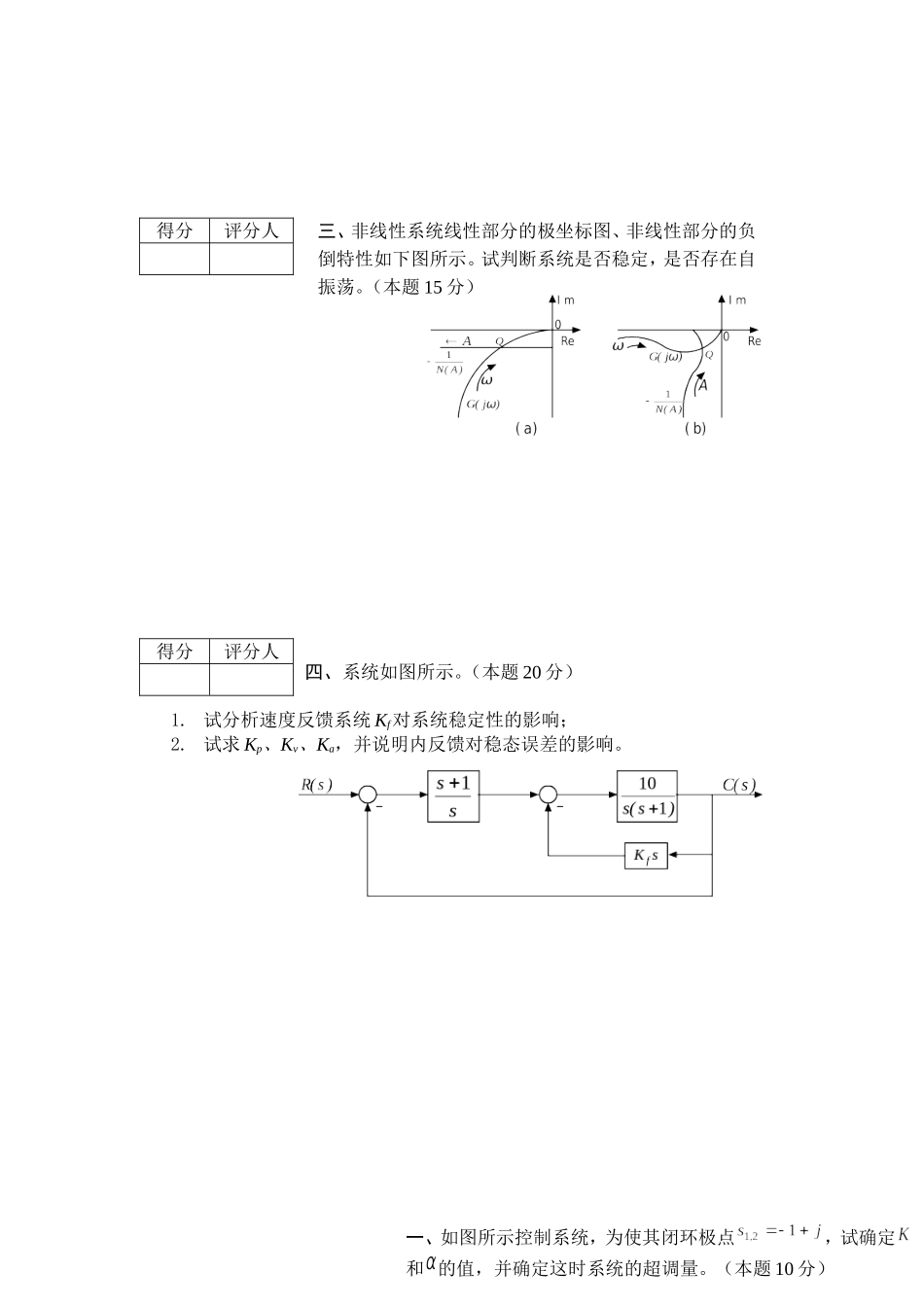
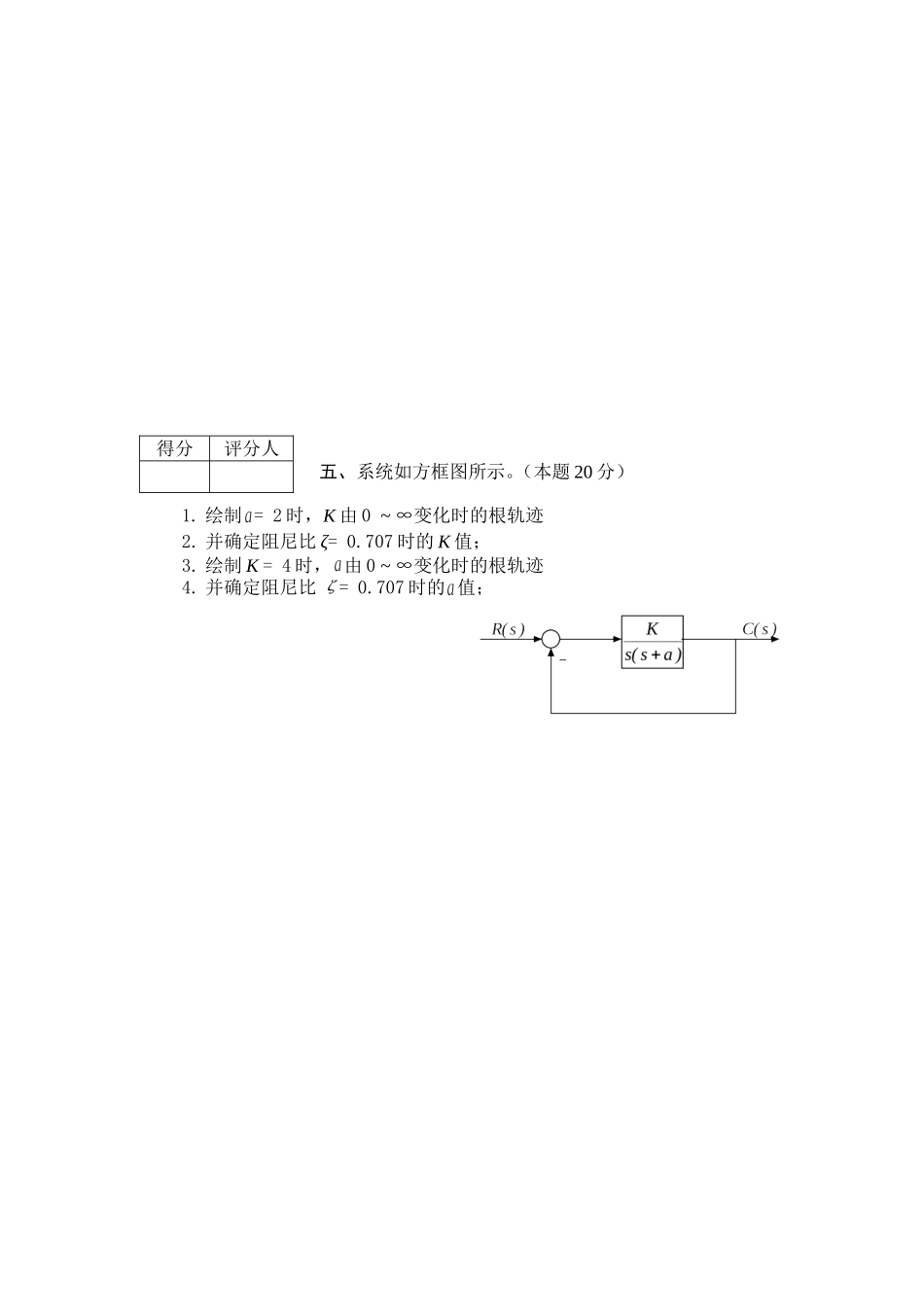
—学年第一学期考试试卷课程编号:课程名称:自动控制原理试卷类型:A√、B□卷考试形式:开□、闭√卷考试时间:120分钟题号一二三四五六总分总分人得分得分评分人得分评分人一、如图所示控制系统,为使其闭环极点,试确定和的值,并确定这时系统的超调量。(本题10分)二、求图2.所示系统传递函数。(本题15分)得分评分人得分评分人1.试分析速度反馈系统Kf对系统稳定性的影响;2.试求Kp、Kv、Ka,并说明内反馈对稳态误差的影响。三、非线性系统线性部分的极坐标图、非线性部分的负倒特性如下图所示。试判断系统是否稳定,是否存在自振荡。(本题15分)一、如图所示控制系统,为使其闭环极点,试确定和的值,并确定这时系统的超调量。(本题10分)四、系统如图所示。(本题20分)得分评分人1.绘制=2时,K由0~∞变化时的根轨迹2.并确定阻尼比ζ=0.707时的K值;3.绘制K=4时,由0~∞变化时的根轨迹4.并确定阻尼比ζ=0.707时的值;五、系统如方框图所示。(本题20分)得分评分人1.试求校正后系统的相位裕量;2.确定其校正装置的传递函数;3.采用的是何校正环节,并说明校正目的。六、某单位反馈控制系统之开环传递函数为今希望校正后的系统能具有图所示之开环频率特性。(本题20分)参考答案一、(10分)如图所示控制系统,为使其闭环极点,试确定和的值,并确定这时系统的超调量。解:①系统闭环传递函数为解得,,,,,②系统超调量为二、(15分)求图2.所示系统传递函数。解:利用公式求,,,,三、(15分)非线性系统线性部分的极坐标图、非线性部分的负倒特性如下图所示。试判断系统是否稳定,是否存在自振荡。解:(a)当非线性环节的输入幅值大于点的幅值时,系统是稳定的,其幅值逐渐减小;当非线性环节的输入幅值小于点的幅值时,系统是不稳定的,其幅值逐渐增大;系统最终只能工作在点,因此该点为稳定的自振荡点。(b)当非线性环节的输入幅值大于点的幅值时,系统工作于不稳定状态,其幅值逐渐增加至无穷或饱和点;当非线性环节的输入幅值小于点的幅值时,系统是稳定的,其幅值逐渐减小至平衡状态;系统不可能工作在点,因此该点为不稳定的自振荡点。四、系统如图所示。(20分)3.试分析速度反馈系统Kf对系统稳定性的影响;4.试求Kp、Kv、Ka,并说明内反馈对稳态误差的影响。解:1.系统开环传递函数为系统特征方程为由判据的必要条件由判据的充分条件得2.由静态误差系数定义可得,,内反馈不改变系统型号,当输入为加速度信号时,由可知内反馈系数使稳态误差增大五、系统如方框图所示。(20分)1.绘制=2时,K由0~∞变化时的根轨迹并确定阻尼比ζ=0.707时的K值;2.绘制K=4时,由0~∞变化时的根轨迹并确定阻尼比ζ=0.707时的值;解:a)=2时根轨迹方程为开环极点,其根轨迹如图1所示。由图可得:,对应b)K=4时根轨迹方程为开环零、极点,其根轨迹如图1所示。由图可得:,对应六、(20分)某单位反馈控制系统之开环传递函数为今希望校正后的系统能具有图所示之开环频率特性。1.试求校正后系统的相位裕量;2.确定其校正装置的传递函数;3.采用的是何校正环节,并说明校正目的。解:1.由图有,得2.已校正系统开环传递函数:低频段斜率,,,斜率为,贯性环节,斜率为,贯性环节对应已校正开环传递函数为由图可知,算得3.其校正环节传递函数为滞后—超前校正环节。其校正目的是全面提高系统性能,即既提高稳态性能,又提高了系统稳定性和动态性能。






 VIP
VIP

