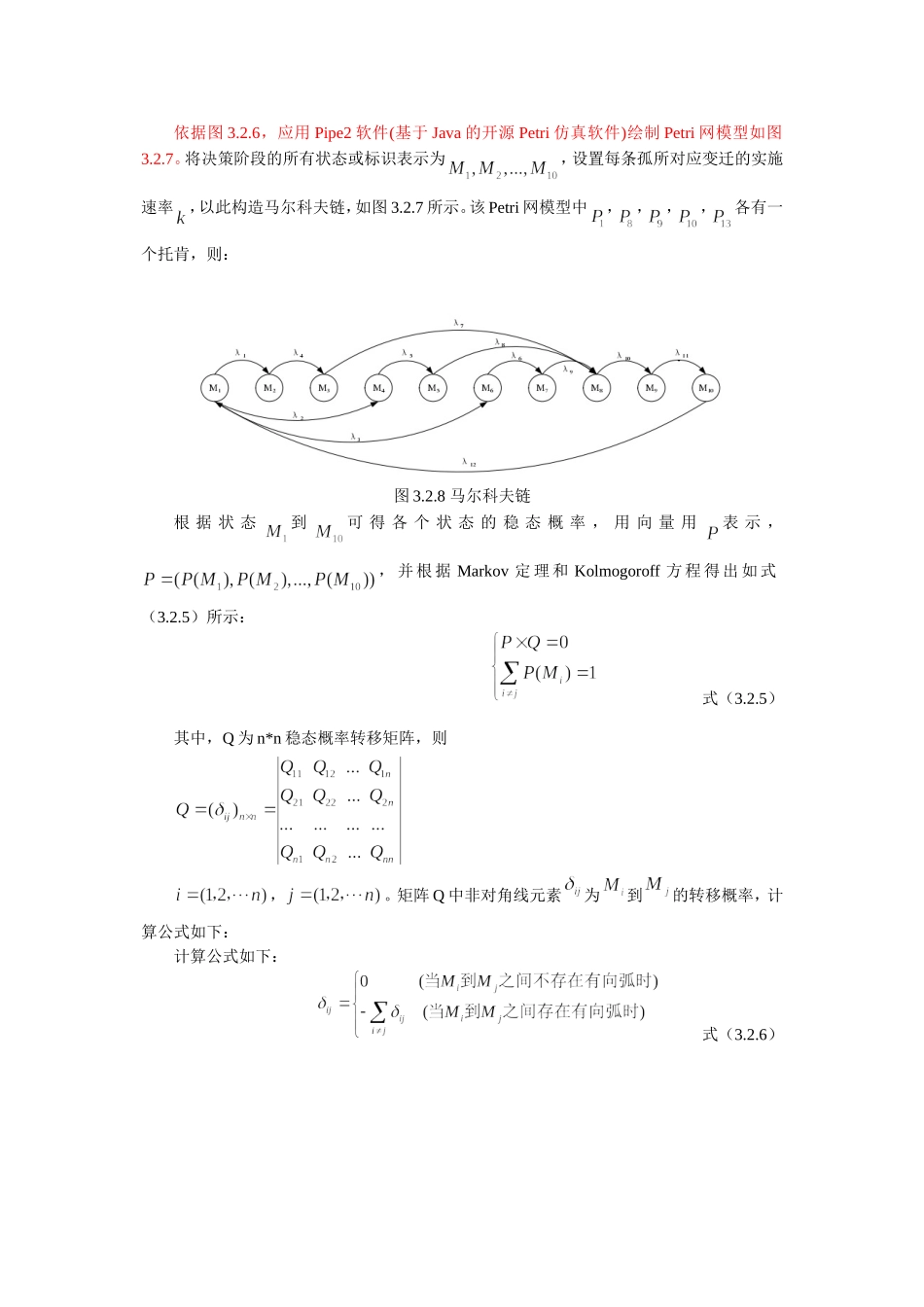
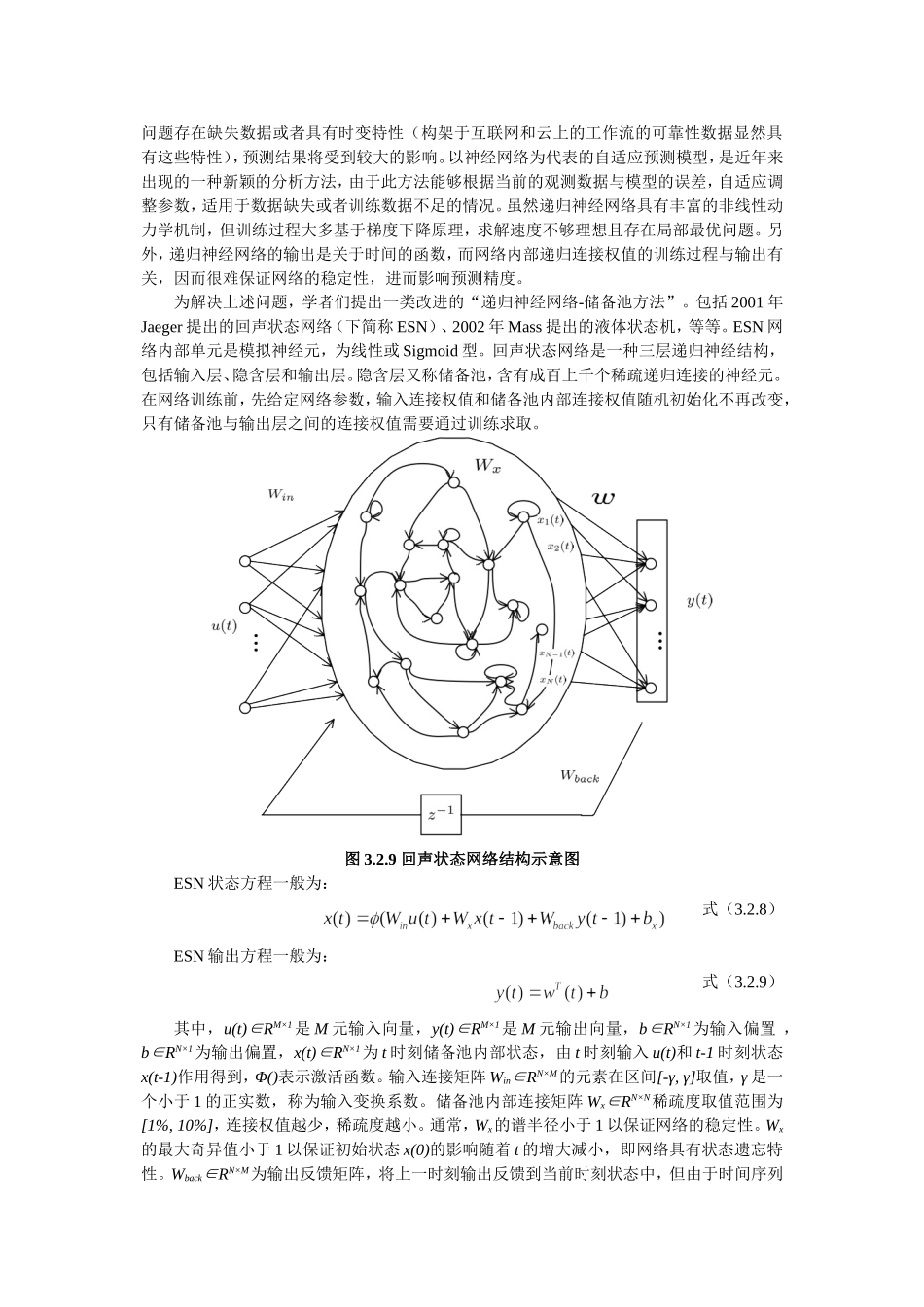
依据图3.2.6,应用Pipe2软件(基于Java的开源Petri仿真软件)绘制Petri网模型如图3.2.7。将决策阶段的所有状态或标识表示为,设置每条孤所对应变迁的实施速率,以此构造马尔科夫链,如图3.2.7所示。该Petri网模型中,,,,各有一个托肯,则:图3.2.8马尔科夫链根据状态到可得各个状态的稳态概率,用向量用表示,,并根据Markov定理和Kolmogoroff方程得出如式(3.2.5)所示:式(3.2.5)其中,Q为n*n稳态概率转移矩阵,则,。矩阵Q中非对角线元素为到的转移概率,计算公式如下:计算公式如下:式(3.2.6)得:则公式(3.2.5)可以改写为:式(3.2.7)通过构造模覆盖树的模型图,得到的状态节点数以及连接弧数与仿真工具进行状态空间工具进行仿真所得的结果是完全一致的;如果整个流程中资源的流动流畅的,既没有阻塞发生也没有无限的等待某个任务,表明整个应急处置指挥信息调度业务流程的所有任务都会在有限时间内完成;如果不存在某一个状态标志没有任何变迁可以达到,表明模型中不存在死锁,如有死锁,需要改进模型图。以上述分析计算为基础,我么可以直接运用随机Petri网的和随机过程的分析技术,获得多个瞬态(如任务响应时间)和稳态(如平均任务负载)的指标的计算结果。3.2.3时变波动可靠性预测和可靠性感知工作流调度基于“回声状态网络-多元时间序列”的时变/波动可靠性预测多元时间序列预测是指对于那些无法建立精确机理模型的复杂系统,实验或观测得到的多元时间序列为切入点,研究系统的内在变化规律,寻找反映系统本质特征的不变量,预测系统的未来变化,最终达到解释、指导和控制实际复杂系统的目的。多元时间序列预测按照预测步长可分为短期、中期和长期预测。短期预测通常指单步预测,根据第t时刻及其之前的数据,预测第t+1时刻的数据。中期和长期预测属于多步预测,即根据t时刻及其之前的数据来预测第t+x(x>1)时刻的数据。多步预测包括直接和间接两种形式,其中直接预测是指建立第t时刻与t+x时刻数据的直接映射关系,间接预测是指采用第t时刻(含之前时刻)数据预测第t+1时刻的数据,接着将预测值作为预测下一时刻的输入数据,如此迭代预测出第t+x时刻的数据。间接多步预测将误差也一起迭代,累积误差迅速増大,对预测模型的非线性映射能力要求较高。经典的时间序列预测模型均是在观测数据相对完整的条件下建立的,如果实际非线性问题存在缺失数据或者具有时变特性(构架于互联网和云上的工作流的可靠性数据显然具有这些特性),预测结果将受到较大的影响。以神经网络为代表的自适应预测模型,是近年来出现的一种新颖的分析方法,由于此方法能够根据当前的观测数据与模型的误差,自适应调整参数,适用于数据缺失或者训练数据不足的情况。虽然递归神经网络具有丰富的非线性动力学机制,但训练过程大多基于梯度下降原理,求解速度不够理想且存在局部最优问题。另外,递归神经网络的输出是关于时间的函数,而网络内部递归连接权值的训练过程与输出有关,因而很难保证网络的稳定性,进而影响预测精度。为解决上述问题,学者们提出一类改进的“递归神经网络-储备池方法”。包括2001年Jaeger提出的回声状态网络(下简称ESN)、2002年Mass提出的液体状态机,等等。ESN网络内部单元是模拟神经元,为线性或Sigmoid型。回声状态网络是一种三层递归神经结构,包括输入层、隐含层和输出层。隐含层又称储备池,含有成百上千个稀疏递归连接的神经元。在网络训练前,先给定网络参数,输入连接权值和储备池内部连接权值随机初始化不再改变,只有储备池与输出层之间的连接权值需要通过训练求取。图3.2.9回声状态网络结构示意图ESN状态方程一般为:式(3.2.8)ESN输出方程一般为:式(3.2.9)其中,u(t)∈RM×1是M元输入向量,y(t)∈RM×1是M元输出向量,b∈RN×1为输入偏置,b∈RN×1为输出偏置,x(t)∈RN×1为t时刻储备池内部状态,由t时刻输入u(t)和t-1时刻状态x(t-1)作用得到,Φ()表示激活函数。输入连接矩阵Win∈RN×M的元素在区间[-γ,γ]取值,γ是一个小于1的正实数,称为输入变换系数。储备池内部连接矩阵Wx∈RN×N稀疏度取值范围为[1%,10%],连接权值越少,稀疏度越小。通...