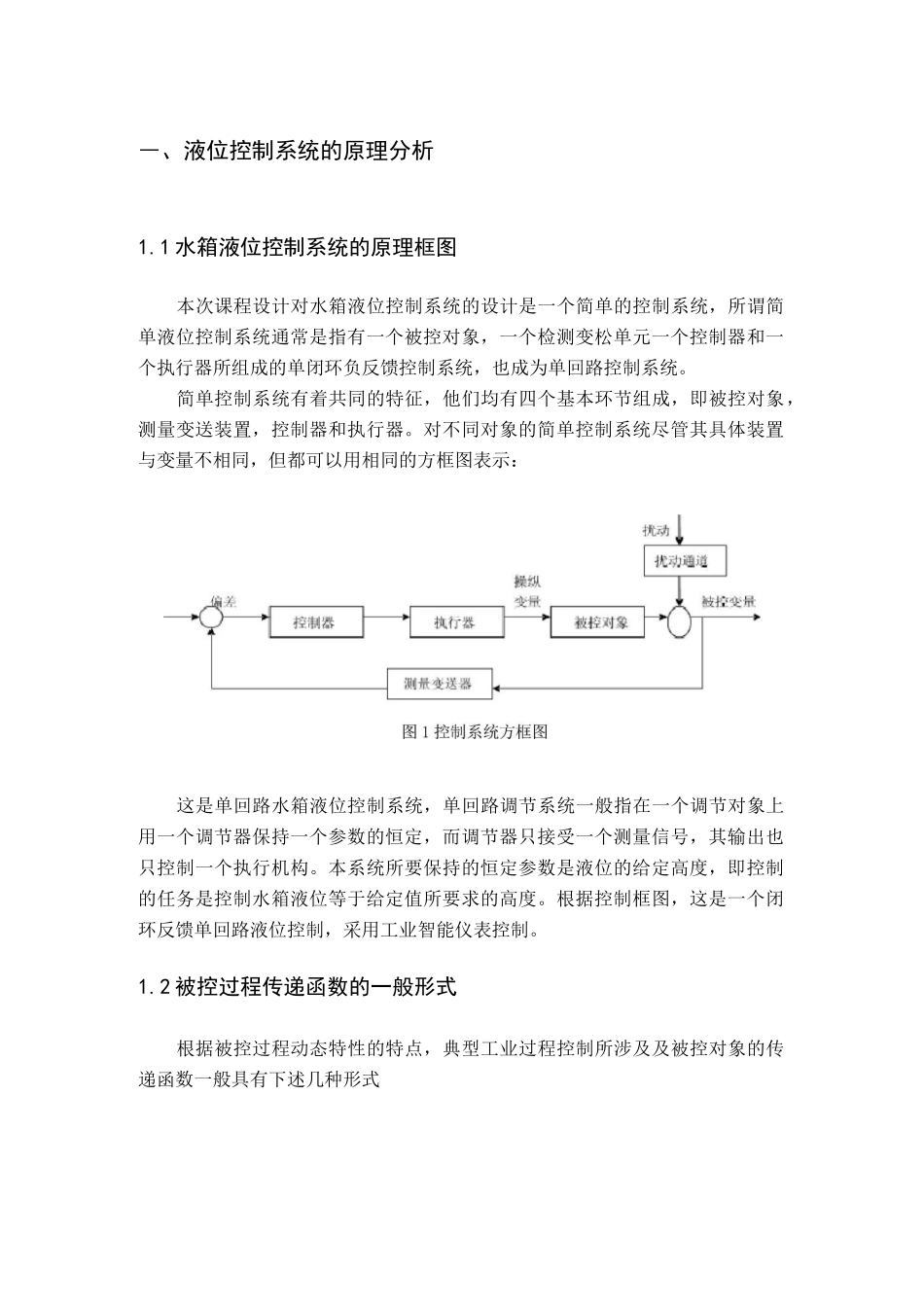
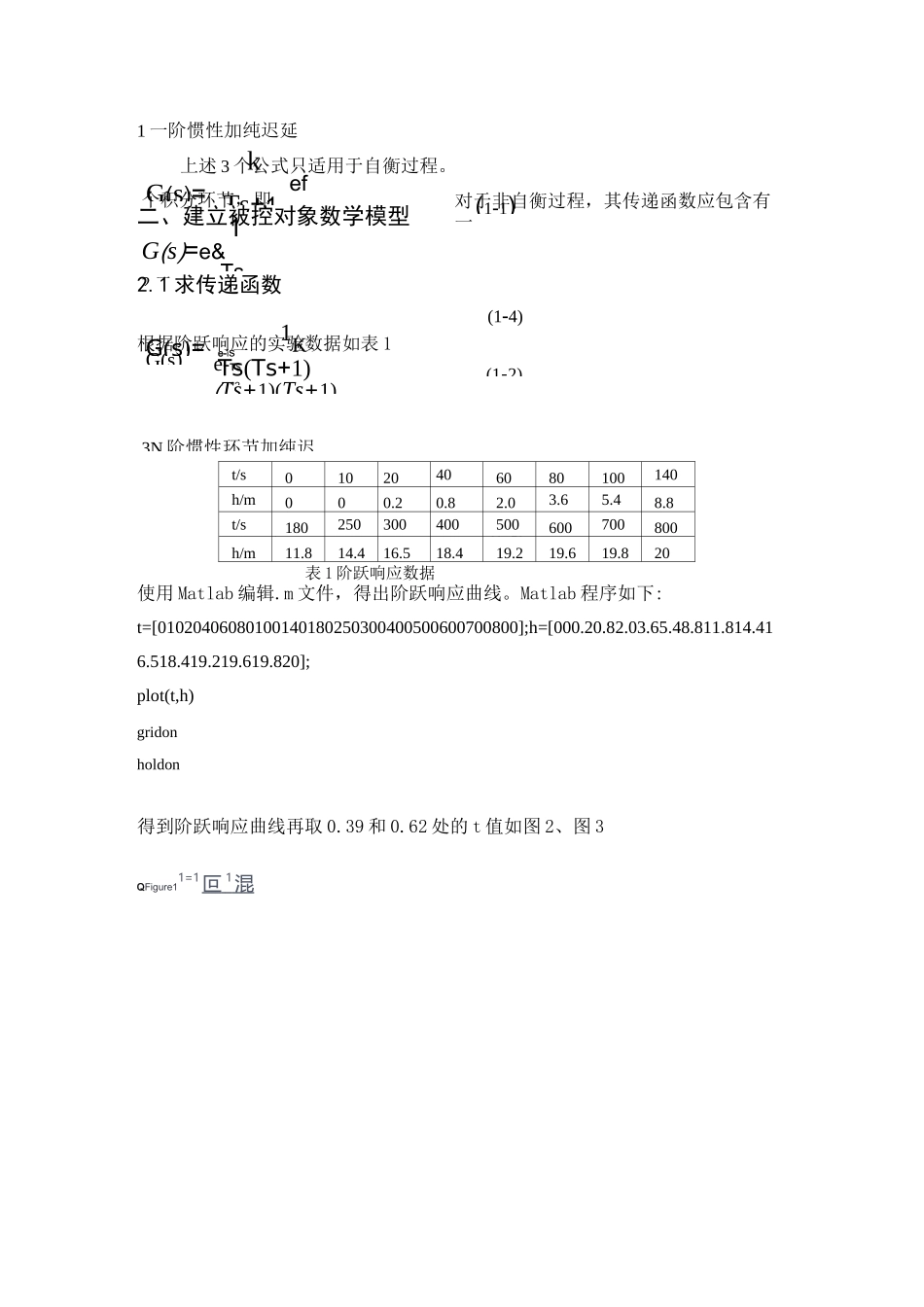
―、液位控制系统的原理分析1.1水箱液位控制系统的原理框图本次课程设计对水箱液位控制系统的设计是一个简单的控制系统,所谓简单液位控制系统通常是指有一个被控对象,一个检测变松单元一个控制器和一个执行器所组成的单闭环负反馈控制系统,也成为单回路控制系统。简单控制系统有着共同的特征,他们均有四个基本环节组成,即被控对象,测量变送装置,控制器和执行器。对不同对象的简单控制系统尽管其具体装置与变量不相同,但都可以用相同的方框图表示:这是单回路水箱液位控制系统,单回路调节系统一般指在一个调节对象上用一个调节器保持一个参数的恒定,而调节器只接受一个测量信号,其输出也只控制一个执行机构。本系统所要保持的恒定参数是液位的给定高度,即控制的任务是控制水箱液位等于给定值所要求的高度。根据控制框图,这是一个闭环反馈单回路液位控制,采用工业智能仪表控制。1.2被控过程传递函数的一般形式根据被控过程动态特性的特点,典型工业过程控制所涉及及被控对象的传递函数一般具有下述几种形式G(s)=kefTs+1(1-1)2二G(s)Ke-T$(Ts+1)(Ts+1)(1-2)3N阶惯性环节加纯迟e-is(TS+1)n(1-3)上述3个公式只适用于自衡过程。个积分环节,即1G(s)=e&TsG(s)=1e-isTs(Ts+1)12对于非自衡过程,其传递函数应包含有一(1-4)1一阶惯性加纯迟延二、建立被控对象数学模型2.1求传递函数根据阶跃响应的实验数据如表1t/s01020406080100140h/m000.20.82.03.65.48.8t/s180250300400500600700800h/m11.814.416.518.419.219.619.820表1阶跃响应数据使用Matlab编辑.m文件,得出阶跃响应曲线。Matlab程序如下:t=[01020406080100140180250300400500600700800];h=[000.20.82.03.65.48.811.814.416.518.419.219.619.820];plot(t,h)gridonholdon得到阶跃响应曲线再取0.39和0.62处的t值如图2、图3QFigure11=1叵1混3图2阶跃响应曲线(1)图3阶跃响应曲线(2)2.2计算传递函数并仿真由图1图2可知,在0.39和0.62处的t值分别为128.2和201.7根据T=2t(0.39y(无穷)-1(0.63y(无穷))T=21(t(0.63y(无穷)-t0.39y(无穷))1可得出K=1、T=55、T=147从而得到传递函数为G(s)=147$+]e—55S对该对象进行仿真如图4、图5:5图4原系统simulink结构图图5阶跃响应曲线三、控制系统参数的整定及MATLAB的数字仿真3.1选择控制方案选择PID单闭环控制,其控制原理图6如下:REU1QY图6控制系统原理图通过调节G(s)中的PID参数使得广义对象的特性改善,减少调节时间。c3.2参数整定计算建立对象的simulink模型,仿真如图7:H:回图7simulink模型7通过调节控制器中的PID参数,使调节时间减小,并且速度提升的前提下超调小于25%,且使稳态无差。采用等幅振荡曲线法整定计算PID参数当8.35,T二100,T二25时得等1D幅振荡曲线如图8图8等幅振荡曲线此时P=0.12,1=0.01,D=25,将三个数据带入PID调节器中得到图9图9PID整定曲线(1)由图可知超调量5>25%,继续调节PID参数I=0.005时得到图10,由图可P知超调量5<25%。P图10PID整定曲线(2)四、系统调试、性能分析(1)超调量5=22%(2)峰值时间:t=0.7Sf(3)过渡过程时间t=1.8Ss(4)余差y=1T=0(5)第一个波峰值y1=0.22(6)第二个波峰值y2=0.01(7)衰减比n=y1/y2=22(8)衰减率甲二(y1-y2)/y1=0.95(9)振荡频率w=2n/p=4.8d全部P、I、D的参数P=0.12,1=0.005,D=25五、设计总结在液位系统的控制器设计中,建立了被控对象的数学模型、利用MATLAB仿真及调试实验,同时完成软件设计方面的工作。在本次毕业设计中,通过查阅大量的资料,使我的知识得以扩充,加深了对本专业的认识,这次毕业设计通过老师的指导以及自己的努力,我圆满的完成了任务,达到了设计的目的。我学会9了过程控制设计的基本方法,对系统的整体分析。经过前面的大量研究工作,本课题得出了以下结论:1采用测试法对液位系统进行模型分析,推导出了被控对象的数学模型。2通过MATLAB的数字仿真,确定被控对象模型的正确性。3采用稳定边界法对控制系统的参数进行整定。4通过MATLAB数字仿真,对几种PID参数整定方法进行性能分析。通过这次设计使我明白了有些东西看上去非常简单,当自己置身其中去做时,并不容易。在毕业设计的这段时间里...