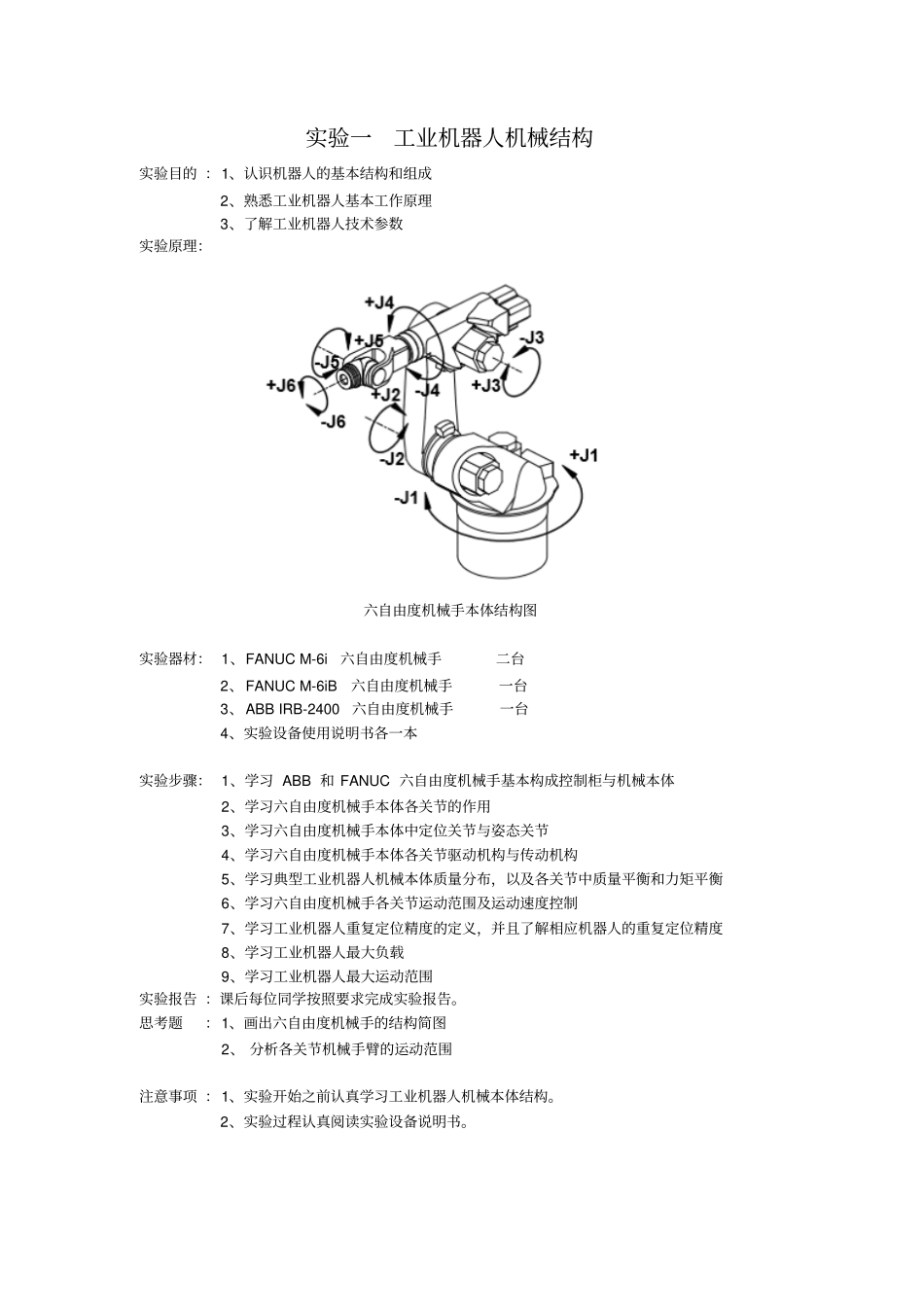
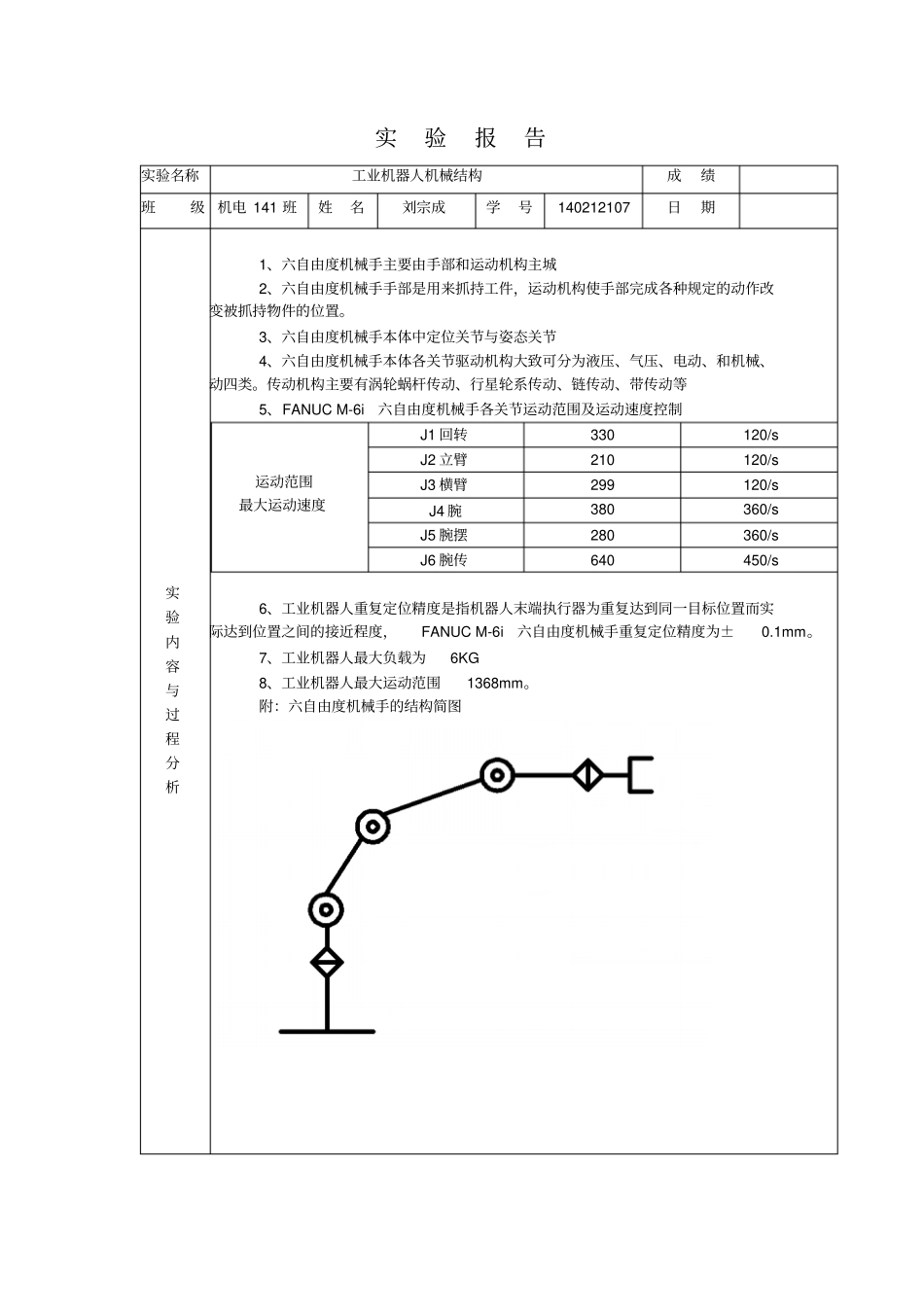
总评成绩:《机器人应用技术》实验报告专业:机电一体化班级:机电141班学号:140212107姓名:刘宗成河南工学院机电工程系实验一工业机器人机械结构实验目的:1、认识机器人的基本结构和组成2、熟悉工业机器人基本工作原理3、了解工业机器人技术参数实验原理:六自由度机械手本体结构图实验器材:1、FANUCM-6i六自由度机械手二台2、FANUCM-6iB六自由度机械手一台3、ABBIRB-2400六自由度机械手一台4、实验设备使用说明书各一本实验步骤:1、学习ABB和FANUC六自由度机械手基本构成控制柜与机械本体2、学习六自由度机械手本体各关节的作用3、学习六自由度机械手本体中定位关节与姿态关节4、学习六自由度机械手本体各关节驱动机构与传动机构5、学习典型工业机器人机械本体质量分布,以及各关节中质量平衡和力矩平衡6、学习六自由度机械手各关节运动范围及运动速度控制7、学习工业机器人重复定位精度的定义,并且了解相应机器人的重复定位精度8、学习工业机器人最大负载9、学习工业机器人最大运动范围实验报告:课后每位同学按照要求完成实验报告。思考题:1、画出六自由度机械手的结构简图2、分析各关节机械手臂的运动范围注意事项:1、实验开始之前认真学习工业机器人机械本体结构。2、实验过程认真阅读实验设备说明书。实验报告实验名称工业机器人机械结构成绩班级机电141班姓名刘宗成学号140212107日期实验内容与过程分析1、六自由度机械手主要由手部和运动机构主城2、六自由度机械手手部是用来抓持工件,运动机构使手部完成各种规定的动作改变被抓持物件的位置。3、六自由度机械手本体中定位关节与姿态关节4、六自由度机械手本体各关节驱动机构大致可分为液压、气压、电动、和机械、动四类。传动机构主要有涡轮蜗杆传动、行星轮系传动、链传动、带传动等5、FANUCM-6i六自由度机械手各关节运动范围及运动速度控制运动范围最大运动速度J1回转330120/sJ2立臂210120/sJ3横臂299120/sJ4腕380360/sJ5腕摆280360/sJ6腕传640450/s6、工业机器人重复定位精度是指机器人末端执行器为重复达到同一目标位置而实际达到位置之间的接近程度,FANUCM-6i六自由度机械手重复定位精度为±0.1mm。7、工业机器人最大负载为6KG8、工业机器人最大运动范围1368mm。附:六自由度机械手的结构简图实验二机器人运动学实验实验目的:1、了解四自由机械臂的开链结构2、掌握机械臂运动关节之间的坐标变换原理3、学会机器人运动方程的正反解方法实验原理:机器人运动学只涉及到物体的运动规律,不考虑产生运动的力和力矩。机器人正运动学所研究的内容是:给定机器人各关节的角度或位移,求解计算机器人末端执行器相对于参考坐标系的位置和姿态问题。各连杆变换矩阵相乘,可得到机器人末端执行器的位姿方程(正运动学方程)为:432140AAAAT=1000zzzzyyyyxxxxpaonpaonpaon其中:z向矢量处于手爪入物体的方向上,称之为接近矢量a,y向矢量的方向从一个指尖指向另一个指尖,处于规定手爪方向上,称为方向矢量o;最后一个矢量叫法线矢量n,它与矢量o和矢量a一起构成一个右手矢量集合,并由矢量的叉乘所规定:aon。上式表示了机器人变换矩阵40T,它描述了末端连杆坐标系{4}相对基坐标系{0}的位姿,是机械手运动分析和综合的基础。实验器材:1、RBT-4T03S机器人一台;2、RBT-4T03S机器人控制柜一台;3、装有运动控制卡和控制软件的计算机一台。实验步骤:1、根据机器人坐标系的建立中得出的A矩阵,相乘后得到T矩阵,根据一一对应的关系,写出机器人正解的运算公式,并填入表6-1中;表6-1机器人的正运动学的参数参数计算公式nxnynzoxoyozaxayazpxpypz2、将变量45,23,15,104321d这组数据带入表6-2中,求出各个分量的值,填入表6-2中;表6-2机器人正运动学输入和输出参数输入值1102-15d323445输出值nxoxaxpxnyoyaypynzozazpz3、运行机器人控制软件,点击“正运动学分析”按钮,出现如图6-1所示界面,输入各个关节的变量值,点击“计算”按钮,各个参数的值显示在相应的框内;图6-1机器人正运动学分析界面4、将计算的值和控制系统软件计算出的值相比较,比较结果是否一致,如果不一致请您分析原因。实验报告:课后每位同学按照...