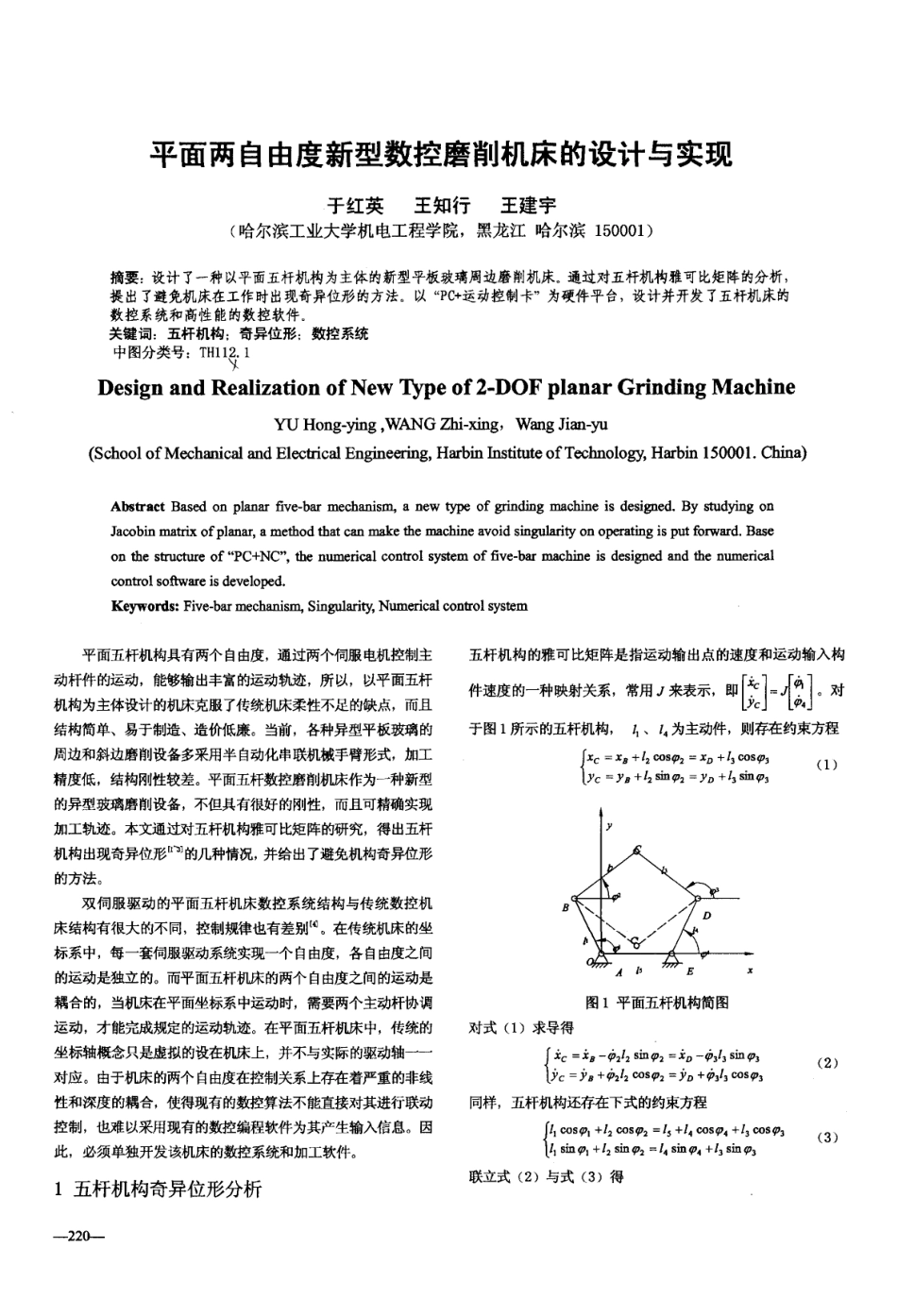
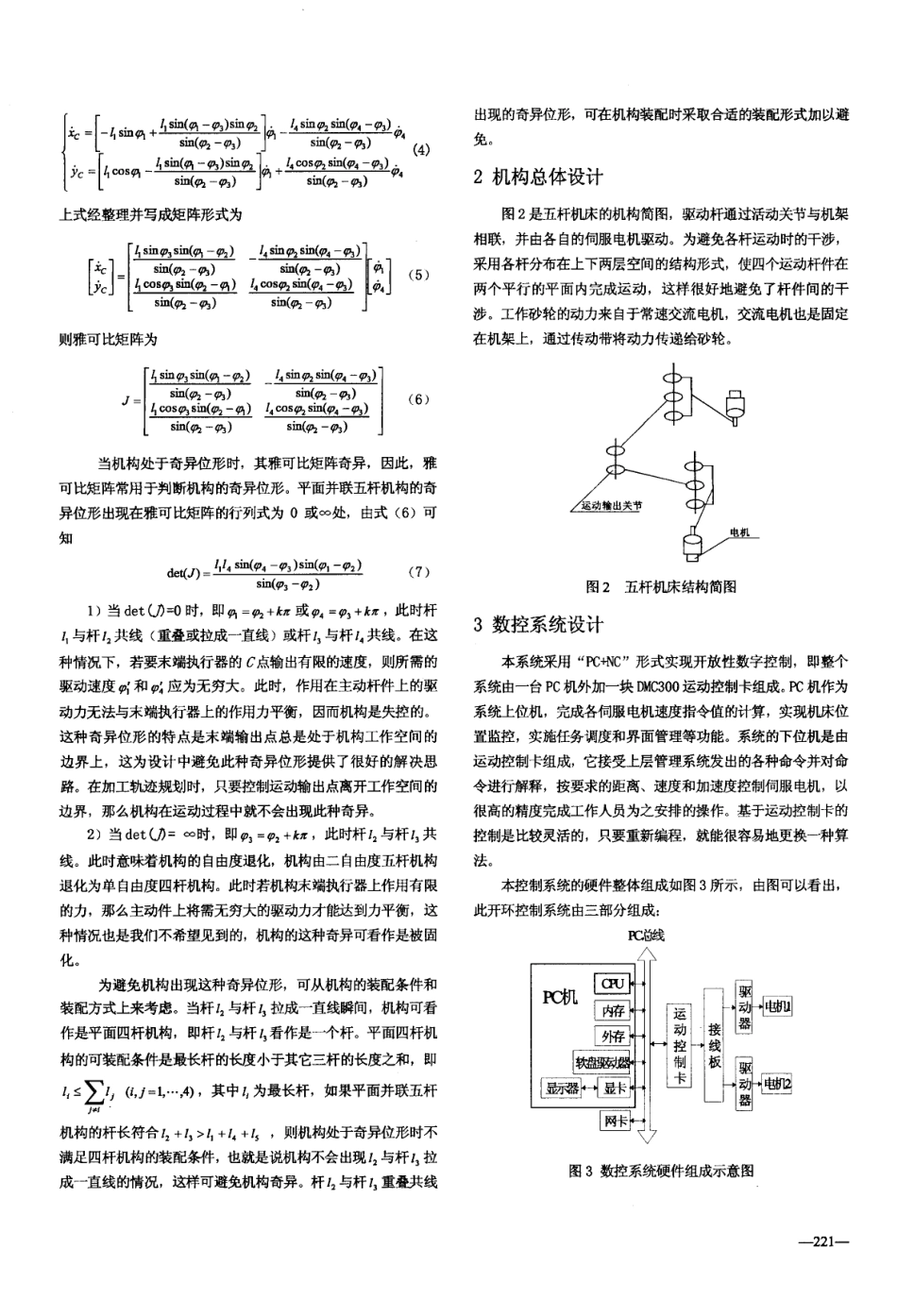
平面两自由度新型数控磨削机床的设计与实现于红英王知行王建宇(哈尔滨工业大学机电工程学院,黑龙江哈尔滨150001)摘要:设计了一种以平面五杆机构为主体的新型平板玻璃周边磨削机床。通过对五杆机构雅可比矩阵的分析,提出了避免机床在工作时出现奇异位形的方法。以“PC+运动控制卡”为硬件平台,设计并开发了五杆机床的数控系统和高性能的数控软件。关键词:五杆机构:奇异位形:1数控系统中图分类号:TH112.丫DesignandRealizationofNew竹peof2-DOFplanarGrindingMachineYUHong-ying,WANGZhi-xing,WangJian-yu(SchoolofMechanicalandElectricalEngineering,HarbinInstituteofTechnology,Harbin150001.China)AbstractBasedonplanarfive-barmechanism,anewtypeofgrindingmachineisdesigned.BystudyingonJacobinmatrixofplanar,amethodthatcanmakethemachineavoidsingularityonoperatingisputforward.Baseonthestructureof"PC+NC",thenumericalcontrolsystemoffive-barmachineisdesignedandthenumericalcontrolsoftwareisdeveloped.Keywords:Five-barmechanism,Singularity,Numericalcontrolsystem平面五杆机构具有两个自由度,通过两个伺服电机控制主动杆件的运动,能够输出丰富的运动轨迹,所以,以平面五杆机构为主体设计的妇U未克服了传统机床柔性不足的缺点,而且结构简单、易于制造、造价低廉。当前,各种异型平板玻璃的周边和斜边磨削设备多采用半自动化串联机械手臂形式,加工精度低,结构刚性较差。平面五杆数控磨削机床作为一种新型的异型玻璃磨削设备,不但具郁R好的刚性,而且可精确实现加工轨迹。本文通过对五杆机构雅可比矩阵的研究,得出五杆机构出现奇异位形11-37的几种情况,并给出了避免机构奇异位形的方法。双伺服驱动的平面五杆机床数控系统结构与传统数控机床结构有很大的不同,控制规律也有差别【U。在传统机床的坐标系中,每一套伺服驱动系统实现一个自由度,各自由度之间的运动是独立的。而平面五杆机床的两个自由度之间的运动是祸合的,当机床在平面坐标系中运动时,需要两个主动杆协调运动,才能完成规定的运动轨迹。在平面五杆扫U未中,传统的坐标轴概念只是虚拟的设在机床上,并不与实际的驱动轴—对应。由于机床的两个自由度在控制关系上存在着严重的非线性和深度的祸合,使得现有的数控算法不能直接对其进行联动控制,也难以采用现有的数控编程软件为其产生输入信息。因此,必须单独开发该机床的数控系统和加工软件。1五杆机构奇异位形分析五杆机构的雅可比矩阵是指运动输出点的速度和运动输入构件1/R的一种映射关系,常用,来表示,即fx,{一,I1}1。对LYcJLNJ于图1所示的五杆机构,几、14为主动件,则存在约束方程xC=xB+12Co5OP2YB+人咖92勒十几Cos伪YD+13SIn93(1)YC=图1平面五杆机构简图对式(1)求导得礼一冉几sinopt夕。十九几Cos仇x。-031353nP3夕。+价,几COS93(2)同样,五杆机构还存在下式的约束方程OOS4P,+12COS92=15+I4COS94+13COSV3sinip,+12sinopt=14sin4p4+13sinV3(3)联立式(2)与式(3)得一几Sm仍+1,sin(,一OP3)SnOP2S*92一,P3)八COso,一11Sn3('1-93)sinop.1s173k4p2一931j卜一14Sn1OP2SWO4-93)04S]n('P2-93)。)“十14-S-P2Sln(94-93)}4S1n('P2-93)一一一一.xc,yc︸11‘上式经整理并写成矩阵形式为(5)则雅可比矩阵为出现的奇异位形,可在机构装配时采取合适的装配形式加以避免。2机构总体设计图2是五杆机床的机构简图,驱动杆通过活动关节与机架相联,并由各自的伺服电机驱动。为避免各杆运动时的干涉,采用各杆分布在上下两层空间的结构形式,使四个运动杆件在两个平行的平面内完成运动,这样很好地避免了杆件间的干涉。工作砂轮的动力来自于常速交流电机,交流电机也是固定在机架上,通过传动带将动力传递给砂轮。11sinop3sin(g)一92)S1n(op2一V3)11-SV3S*92一91)14sin92sin(P4一,P3)sm(j,2一93)14COSP2sin(P4一93)(6)sin(一V3)sin(一V)当机构处于奇异位形时,其雅可比矩阵奇异,因此,雅可比矩阵常用于判断机构的奇异位形。平面并联五杆机构的奇异位形出现在雅可比矩阵的行列式为0或0处,由式(6)可知det(J)=丛sin(q,4-q,3)Sin(鱼-92)(7)s坦气...