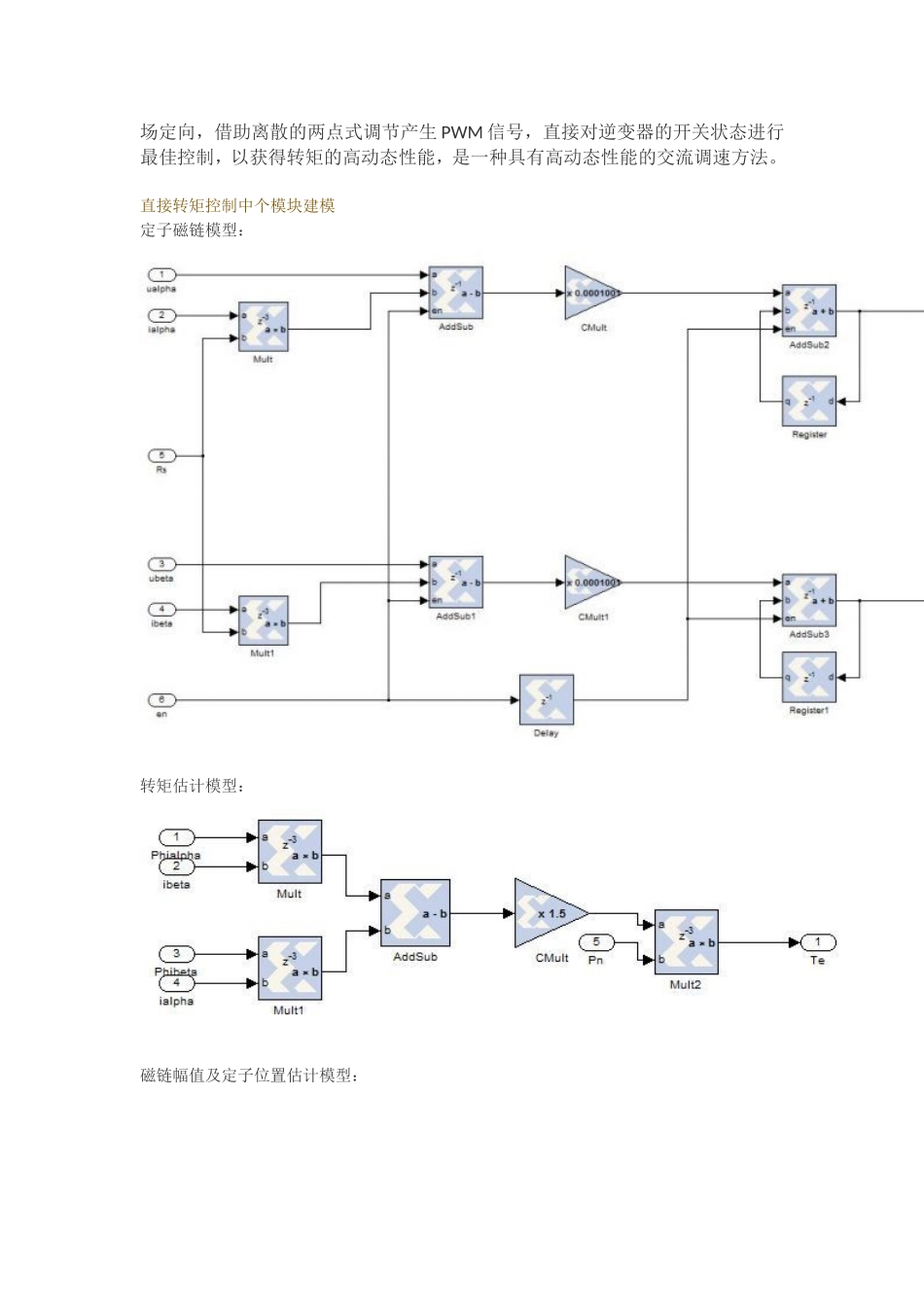
直接转矩控制原理在直接转矩控制中,电机定子磁链的幅值通过上述电压的矢量控制而保持为额定值,要改变转矩大小,可以通过控制定、转子磁链之间的夹角来实现。而夹角可以通过电压空间矢量的控制来调节。由于转子磁链的转动速度保持不变,因此夹角的调节可以通过调节定子磁链的瞬时转动速度来实现。假定电机转子逆时针方向旋转,如果实际转矩小于给定值,则选择使定子磁链逆时针方向旋转的电压矢量,这样角度增加,实际转矩增加,一旦实际转矩高与给定值,则选择电压矢量使定子磁链反方向旋转。从而导致角度降低。通过这种方式选择电压矢量,定子磁链一直旋转,且其旋转方向由转矩滞环控制器决定直接转矩控制对转矩和磁链的控制要通过滞环比较器来实现。滞环比较器的运行原理为:当前值与给定值的误差在滞环比较器的容差范围内时,比较器的输出保持不变,一旦超过这个范围,滞环比较器便给出相应的值。直接转矩控制的原理框图如下所示,给定转速与估计转速相比较,得到给定转矩;经转矩调节器将转矩差做滞环处理得到转矩控制信号;将磁链估计值跟给定磁链相比,经滞环比较器得到磁链控制信号;根据计算的得到的转子位移,划分区段;根据区段,以及转矩和磁链控制信号,结合查找表得出空间矢量,生成PWM波;输出给逆变器,给电机供电。矢量控制技术及直接转矩技术两种控制方案的比较2010-10-1314:48目前,直接转矩控制技术和矢量控制技术在工业现场均有成功的应用实例,它们的应用研究仍在如火如荼地进行着,但无论何种控制方法,研究中总会或多或少地发现其不足。但随着研究的深入、技术水平的提高、硬件条件的改善,许多问题都将会逐步得到解决。从理论上讲,矢量控制是建立在被控对象准确的数学模型上,通过控制电机的电枢电流实现电机的电磁力矩控制。电流环的存在,使电机电枢电流动态跟随系统给定,满足实际对象对电机电磁力矩的要求。电机实际电流受到电机转子位置的实时控制,保证电机电流形成的电枢磁场与转子d轴垂直,实际电机电流中的交轴电流分量和系统控制所需的交轴给定电流相等,控制系统保证实际负载对象的力矩要求,电机所产生的电磁力矩平稳,电机可以运行的转速较低,调速范围较宽。电机启动、制动时,电机所有的电枢电流均用来产生电磁力矩,从而可以充分利用电机的过载能力,提高电机启动、制动速度,保证电机具有优良的启动、制动性能。除此之外,在转子磁场定向矢量控制下,不需要逆变器为电机提供无功励磁电流,电机的单位电流产生最大电磁力矩。直接转矩控制则不然,它只保证实际电磁力矩与给定力矩的吻合程度,并根据力矩误差、磁链误差及磁链所在扇区,选择主电路器件开关状态,使电机磁链按照所定轨迹运行。实施电磁转矩及磁链滞环控制时,电机转矩不可避免地存在脉动直接影响电机在低速运行的平稳性和调速范围。另外,通过电机反电势积分求得定子磁链,这种磁链电压模型在低速运行时准确性很差,受逆变器死区时间、电机电阻及电压检测误差的影响,自然会影响电机低速运行性能,影响电机转速的运行范围。且电机从静止位置开始启动时,因电机定子的初始磁链位置未知,系统无法发出正确的控制信号,电机启动困难。通常是将电机转子拉到固定位置再进行启动。直接转矩控制和矢量控制的比较:直接转矩控制(DTC)技术与传统的矢量控制相比,具有以下的主要特点:1.控制结构非常简单。传统的转子磁场定向的矢量控制系统需要四个PI调节器和一个单独的PWM调节器,而DTC控制仅需要一对滞环控制器和一个速度PI调节器,这使得DTC具有更优良的动态性能;2.直接转矩控制的运算均在定子静止坐标系中进行,不需要在旋转坐标系中对定子电流进行分解和设定,所以不需要像矢量控制那样进行复杂的坐标变换,大大地简化了运算处理过程,简化了控制系统结构,提高了控制运算速度3.直接转矩控制利用一对滞环比较器直接控制了定子磁链和转矩,而不是像矢量控制那样,通过控制定子电流的两个分量间接地控制电机的磁链和转矩,它追求转矩控制的快速性和准确性,并不刻意追求圆形磁链轨迹和正弦波电流。4.直接转矩控制采用空间电压矢量,将逆变器和控制策略一体化设计,并根据磁链...







 VIP
VIP

