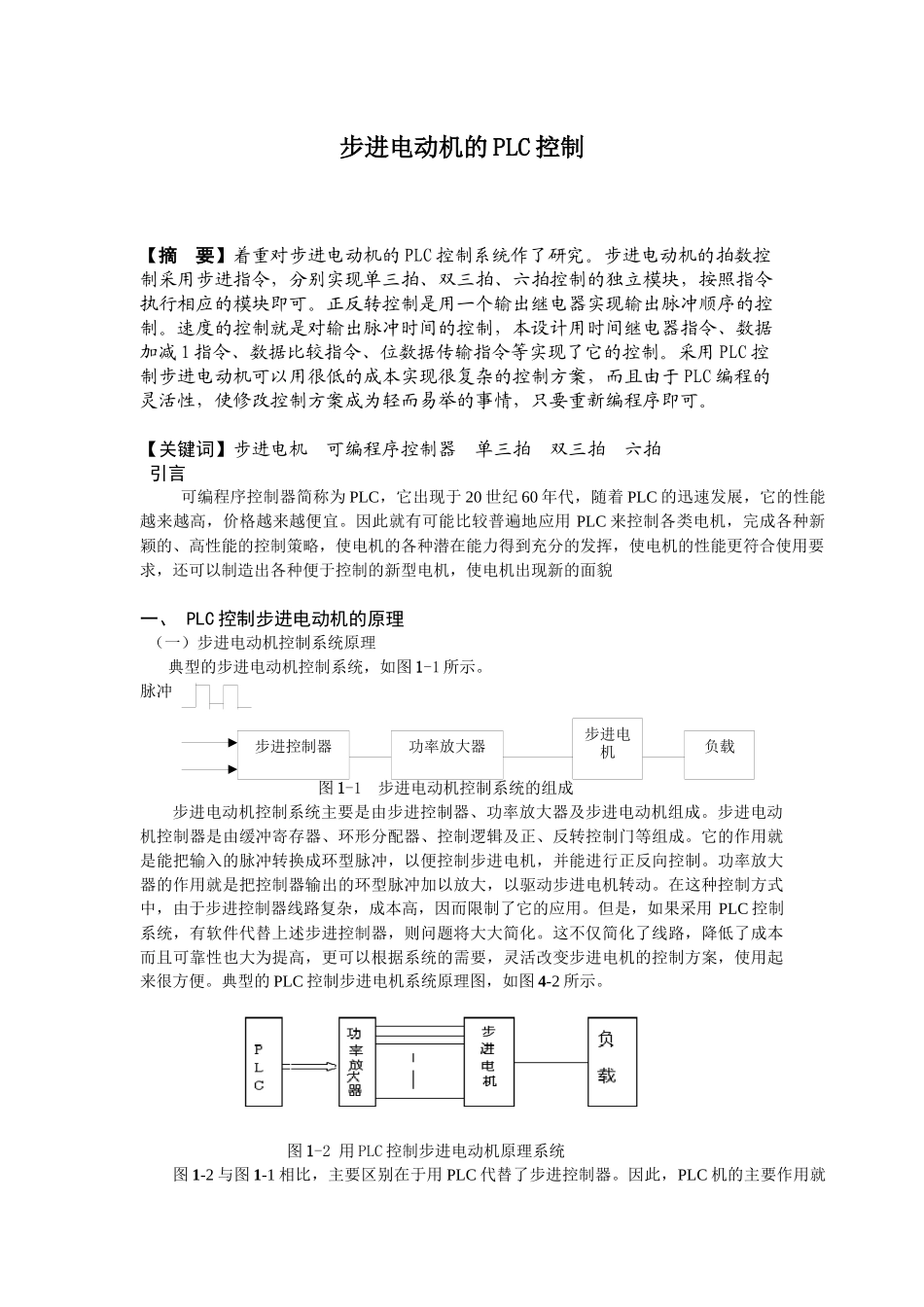
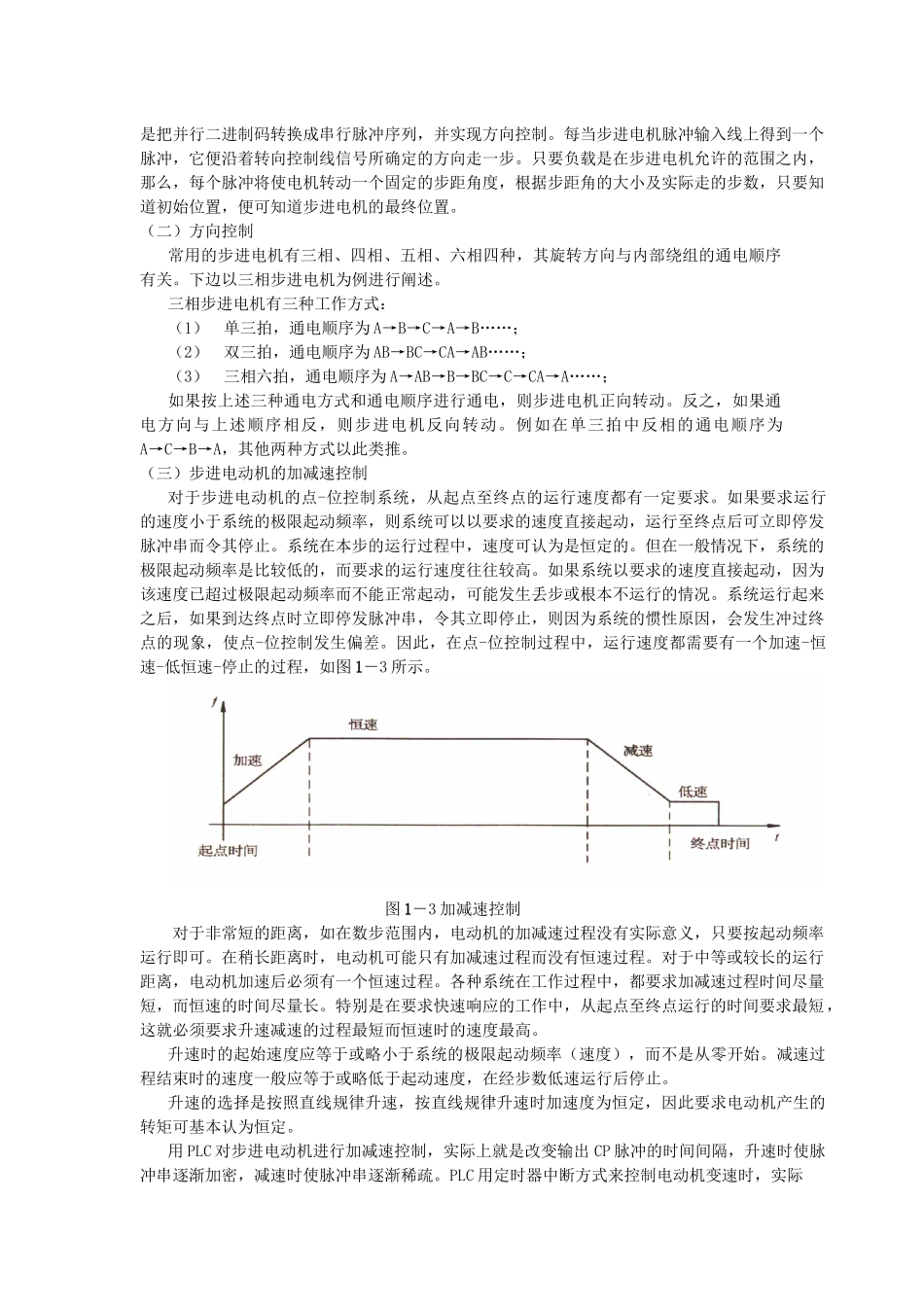
步进控制器功率放大器步进电机负载步进电动机的PLC控制【摘要】着重对步进电动机的PLC控制系统作了研究。步进电动机的拍数控制采用步进指令,分别实现单三拍、双三拍、六拍控制的独立模块,按照指令执行相应的模块即可。正反转控制是用一个输出继电器实现输出脉冲顺序的控制。速度的控制就是对输出脉冲时间的控制,本设计用时间继电器指令、数据加减1指令、数据比较指令、位数据传输指令等实现了它的控制。采用PLC控制步进电动机可以用很低的成本实现很复杂的控制方案,而且由于PLC编程的灵活性,使修改控制方案成为轻而易举的事情,只要重新编程序即可。【关键词】步进电机可编程序控制器单三拍双三拍六拍引言可编程序控制器简称为PLC,它出现于20世纪60年代,随着PLC的迅速发展,它的性能越来越高,价格越来越便宜。因此就有可能比较普遍地应用PLC来控制各类电机,完成各种新颖的、高性能的控制策略,使电机的各种潜在能力得到充分的发挥,使电机的性能更符合使用要求,还可以制造出各种便于控制的新型电机,使电机出现新的面貌一、PLC控制步进电动机的原理(一)步进电动机控制系统原理典型的步进电动机控制系统,如图1-1所示。脉冲图1-1步进电动机控制系统的组成步进电动机控制系统主要是由步进控制器、功率放大器及步进电动机组成。步进电动机控制器是由缓冲寄存器、环形分配器、控制逻辑及正、反转控制门等组成。它的作用就是能把输入的脉冲转换成环型脉冲,以便控制步进电机,并能进行正反向控制。功率放大器的作用就是把控制器输出的环型脉冲加以放大,以驱动步进电机转动。在这种控制方式中,由于步进控制器线路复杂,成本高,因而限制了它的应用。但是,如果采用PLC控制系统,有软件代替上述步进控制器,则问题将大大简化。这不仅简化了线路,降低了成本而且可靠性也大为提高,更可以根据系统的需要,灵活改变步进电机的控制方案,使用起来很方便。典型的PLC控制步进电机系统原理图,如图4-2所示。图1-2用PLC控制步进电动机原理系统图1-2与图1-1相比,主要区别在于用PLC代替了步进控制器。因此,PLC机的主要作用就是把并行二进制码转换成串行脉冲序列,并实现方向控制。每当步进电机脉冲输入线上得到一个脉冲,它便沿着转向控制线信号所确定的方向走一步。只要负载是在步进电机允许的范围之内,那么,每个脉冲将使电机转动一个固定的步距角度,根据步距角的大小及实际走的步数,只要知道初始位置,便可知道步进电机的最终位置。(二)方向控制常用的步进电机有三相、四相、五相、六相四种,其旋转方向与内部绕组的通电顺序有关。下边以三相步进电机为例进行阐述。三相步进电机有三种工作方式:(1)单三拍,通电顺序为A→B→C→A→B……;(2)双三拍,通电顺序为AB→BC→CA→AB……;(3)三相六拍,通电顺序为A→AB→B→BC→C→CA→A……;如果按上述三种通电方式和通电顺序进行通电,则步进电机正向转动。反之,如果通电方向与上述顺序相反,则步进电机反向转动。例如在单三拍中反相的通电顺序为A→C→B→A,其他两种方式以此类推。(三)步进电动机的加减速控制对于步进电动机的点-位控制系统,从起点至终点的运行速度都有一定要求。如果要求运行的速度小于系统的极限起动频率,则系统可以以要求的速度直接起动,运行至终点后可立即停发脉冲串而令其停止。系统在本步的运行过程中,速度可认为是恒定的。但在一般情况下,系统的极限起动频率是比较低的,而要求的运行速度往往较高。如果系统以要求的速度直接起动,因为该速度已超过极限起动频率而不能正常起动,可能发生丢步或根本不运行的情况。系统运行起来之后,如果到达终点时立即停发脉冲串,令其立即停止,则因为系统的惯性原因,会发生冲过终点的现象,使点-位控制发生偏差。因此,在点-位控制过程中,运行速度都需要有一个加速-恒速-低恒速-停止的过程,如图1-3所示。图1-3加减速控制对于非常短的距离,如在数步范围内,电动机的加减速过程没有实际意义,只要按起动频率运行即可。在稍长距离时,电动机可能只有加减速过程而没有恒速过程。对于中等或较长的运行距离,电动机加速后必须有一个恒速过程。各种系...