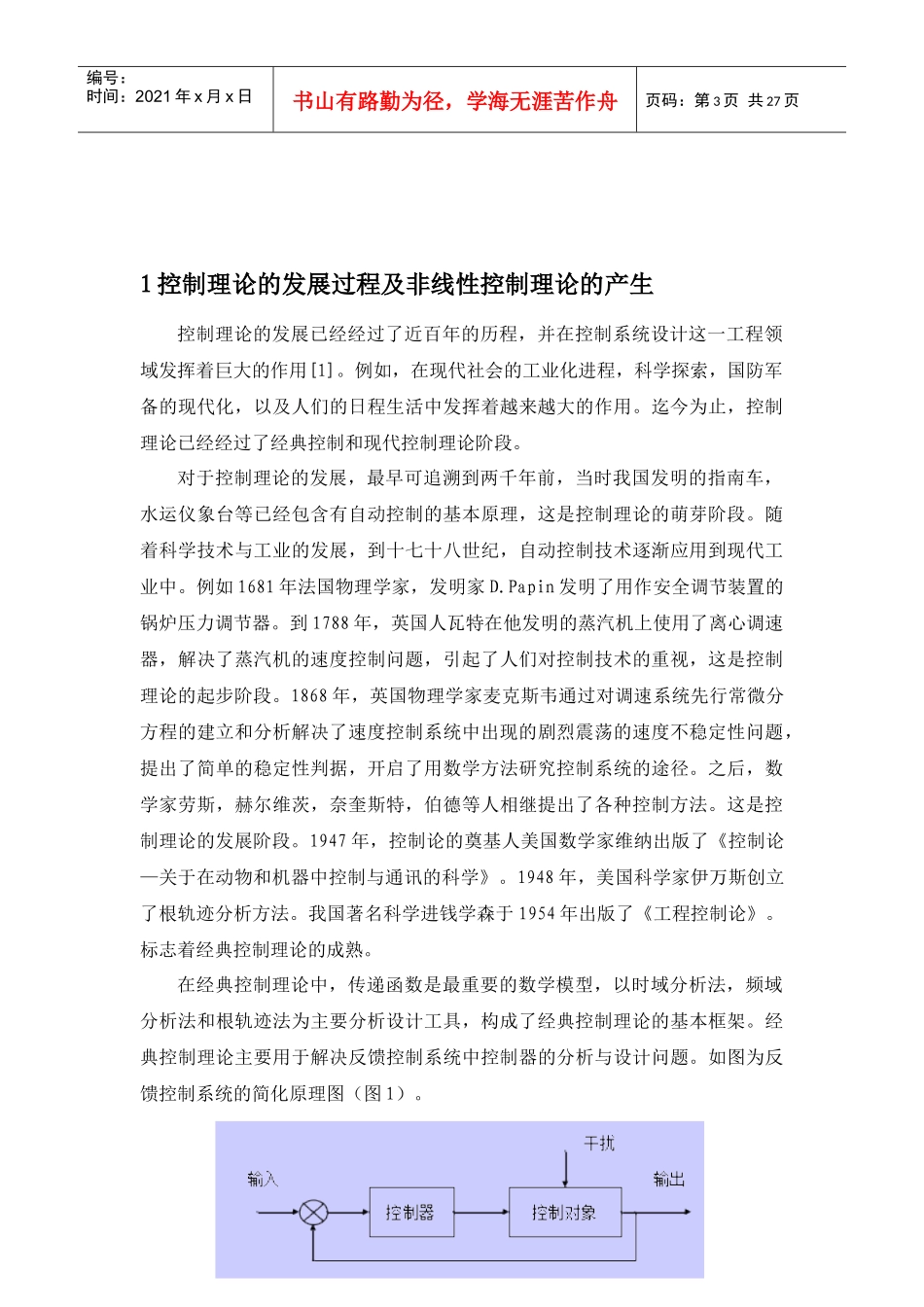
第1页共27页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页共27页机电系统非线性控制方法的发展方向摘要控制理论的发展经过了经典控制理阶段和现代控制理论阶段。但是两者所针对的主要是线性系统。然而,实际工程问题中所遇到的系统大多是非线性的,采用上述两种理论只能是对实际系统进行近似线性化。在一定范围内采用这种近似现行化的方法可以达到需要的精度。但是在某些情况下,比如本质非线性就无法采用前述方法。这种情况下就必须采用非线性控制理论。非线性控制的经典方法主要有相平面法,描述函数法,绝对稳定性理论,李亚普诺夫稳定性理论,输入输出稳定性理论。但是这些经典理论存在着局限性,不够完善。随着非线性科学的发展,一些新的方法随之产生。最新的发展成果主要有:微分几何法,微分代数法,变结构控制理论,非线性控制系统的镇定设计,逆系统方法,神经网络方法,非线性频域控制理论和混沌动力学方法。这些新成果对于解决非线性系统的控制问题,完善非线性系统理论具有重要作用,也是今后非线性系统控制的发展方向。关键词非线性控制;最新发展成果;发展方向第2页共27页第1页共27页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第2页共27页引言迄今为止,控制理论的发展经过了经典控制理论和现代控制理论阶段。经典控制阶段主要针对的是单输入单输出(SISO)线性系统,通过在时域和频域内对系统进行建模实现对系统的定量和定性分析,经典控制理论在工程界得到了广泛的应用,而且经典控制方法已经形成了完善的理论体系。然而,随着科学技术的发展,经典控制方法也暴露出了其自身的缺陷,经典控制方法并不关心系统内部的状态变化,而只是局限于将被控对象看作一个整体,并不能准确了解系统内部的状态变化。为了克服经典控制方法的这种缺陷,现代控制方法产生了。现代控制理论只要是在时域内对系统进行建模分析,通过建立系统的状态方程,了解系统内部的状态变化,对系统的了解更加全面透彻。该理论主要针对多输入多输出(MIMO)的线性系统。经典控制理论和现代控制理论的结合使得控制理论在线性问题的控制上达到了完善的地步,在工程界得到了广泛的应用。然而,经典控制论和现代控制论所针对的是线性系统,实际问题大多是非线性系统,早期的处理方法是将非线性问题线性化,然后再应用上述两种理论。这种方法在一定的范围和精度内可以很好的满足工程需要。随着科学技术的发展,上述两种方法遇到了挑战,例如本质非线性问题,这种问题无法进行局部线性化。因此,要解决这类问题就必须要有一套相应的非线性控制理论。本文通过阐述控制理论的发展过程中各种理论的应用范围和局限性,特别是针对非线性问题的处理方法,介绍了非线性控制理论要解决的问题,非线性控制的经典方法和最新发展成果,并阐述了非线性控制理论的发展方向。第3页共27页第2页共27页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第3页共27页1控制理论的发展过程及非线性控制理论的产生控制理论的发展已经经过了近百年的历程,并在控制系统设计这一工程领域发挥着巨大的作用[1]。例如,在现代社会的工业化进程,科学探索,国防军备的现代化,以及人们的日程生活中发挥着越来越大的作用。迄今为止,控制理论已经经过了经典控制和现代控制理论阶段。对于控制理论的发展,最早可追溯到两千年前,当时我国发明的指南车,水运仪象台等已经包含有自动控制的基本原理,这是控制理论的萌芽阶段。随着科学技术与工业的发展,到十七十八世纪,自动控制技术逐渐应用到现代工业中。例如1681年法国物理学家,发明家D.Papin发明了用作安全调节装置的锅炉压力调节器。到1788年,英国人瓦特在他发明的蒸汽机上使用了离心调速器,解决了蒸汽机的速度控制问题,引起了人们对控制技术的重视,这是控制理论的起步阶段。1868年,英国物理学家麦克斯韦通过对调速系统先行常微分方程的建立和分析解决了速度控制系统中出现的剧烈震荡的速度不稳定性问题,提出了简单的稳定性判据,开启了用数学方法研究控制系统的途径。之后,数学家劳斯,赫尔维茨,奈奎斯特,伯德...