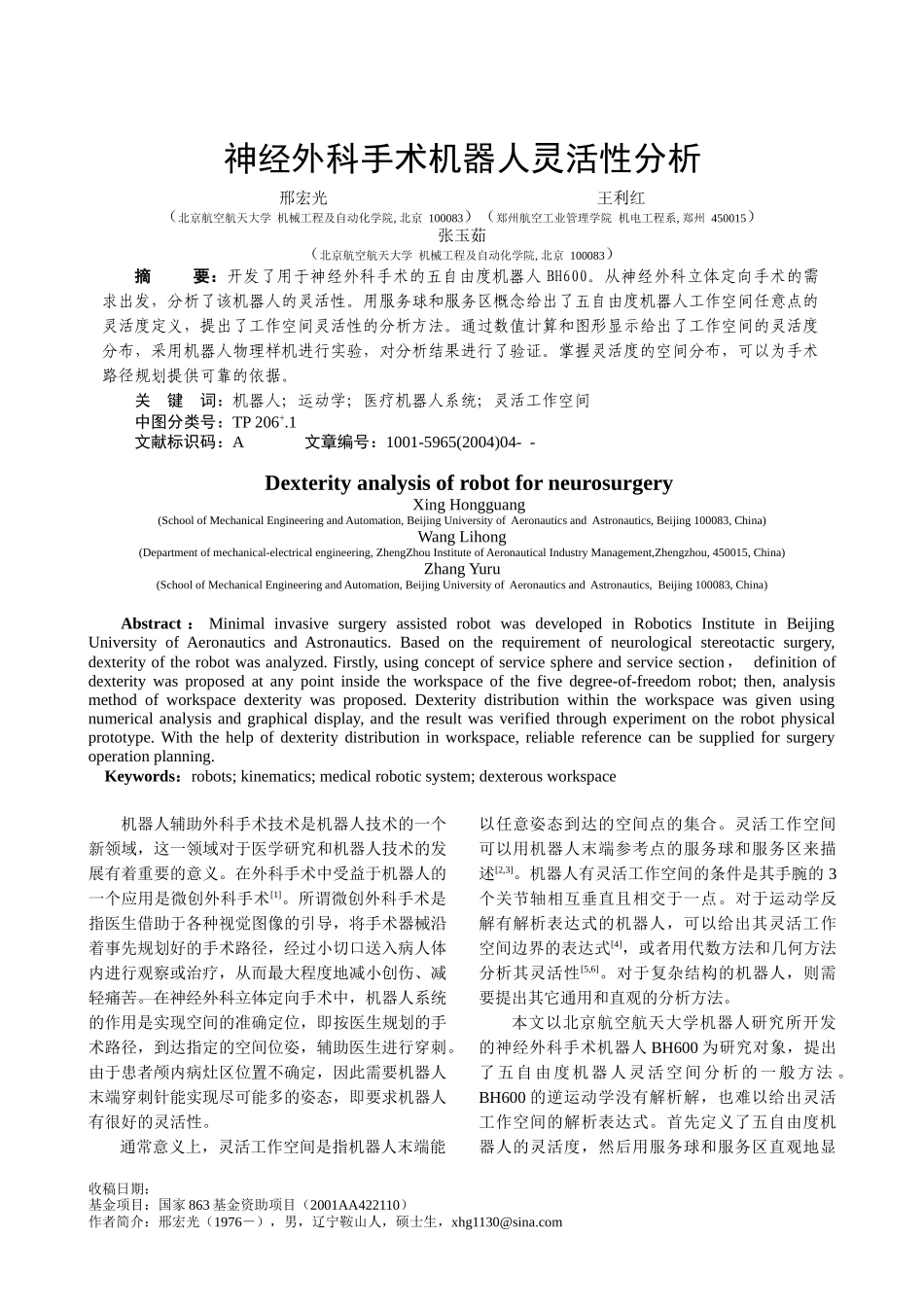
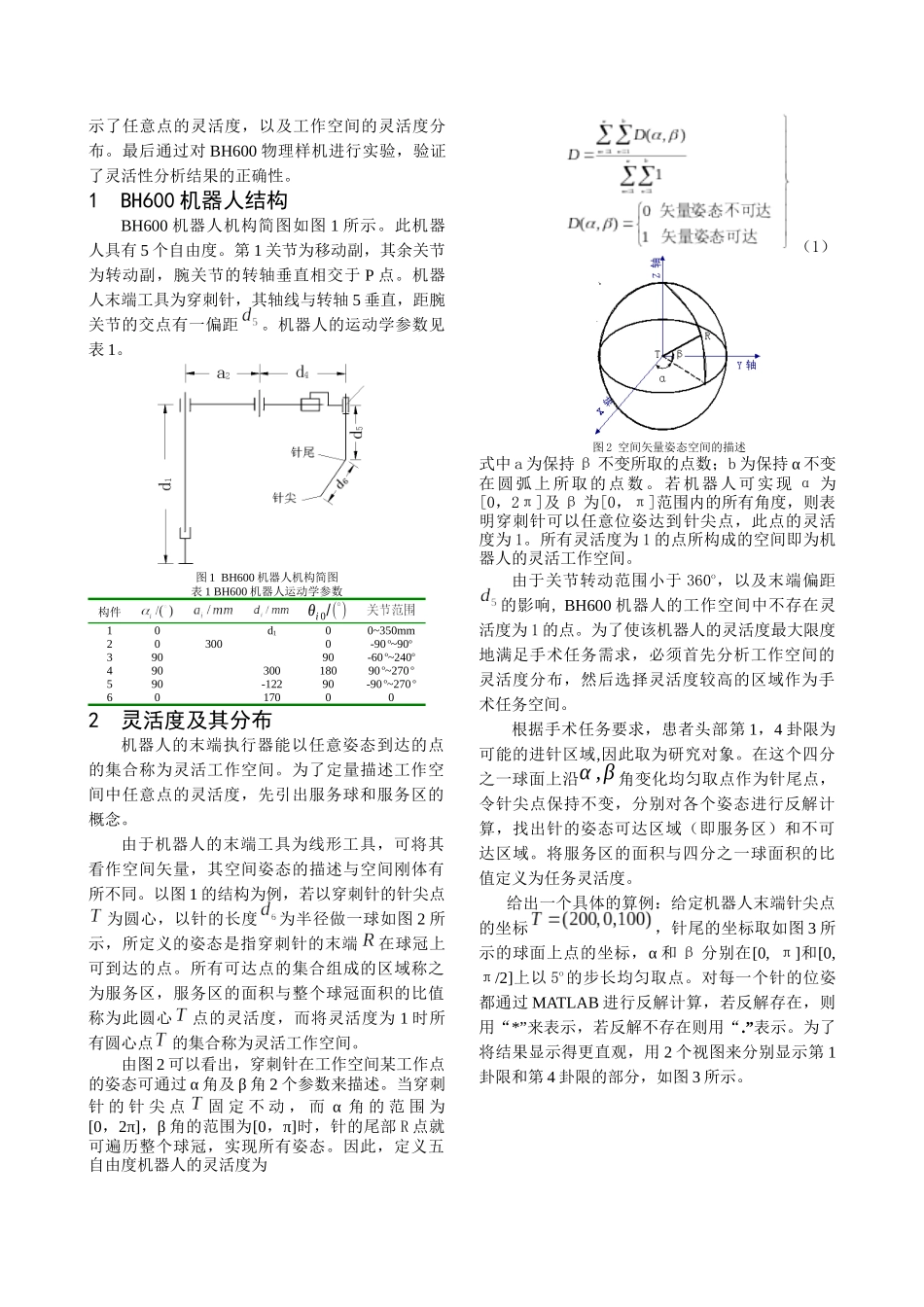
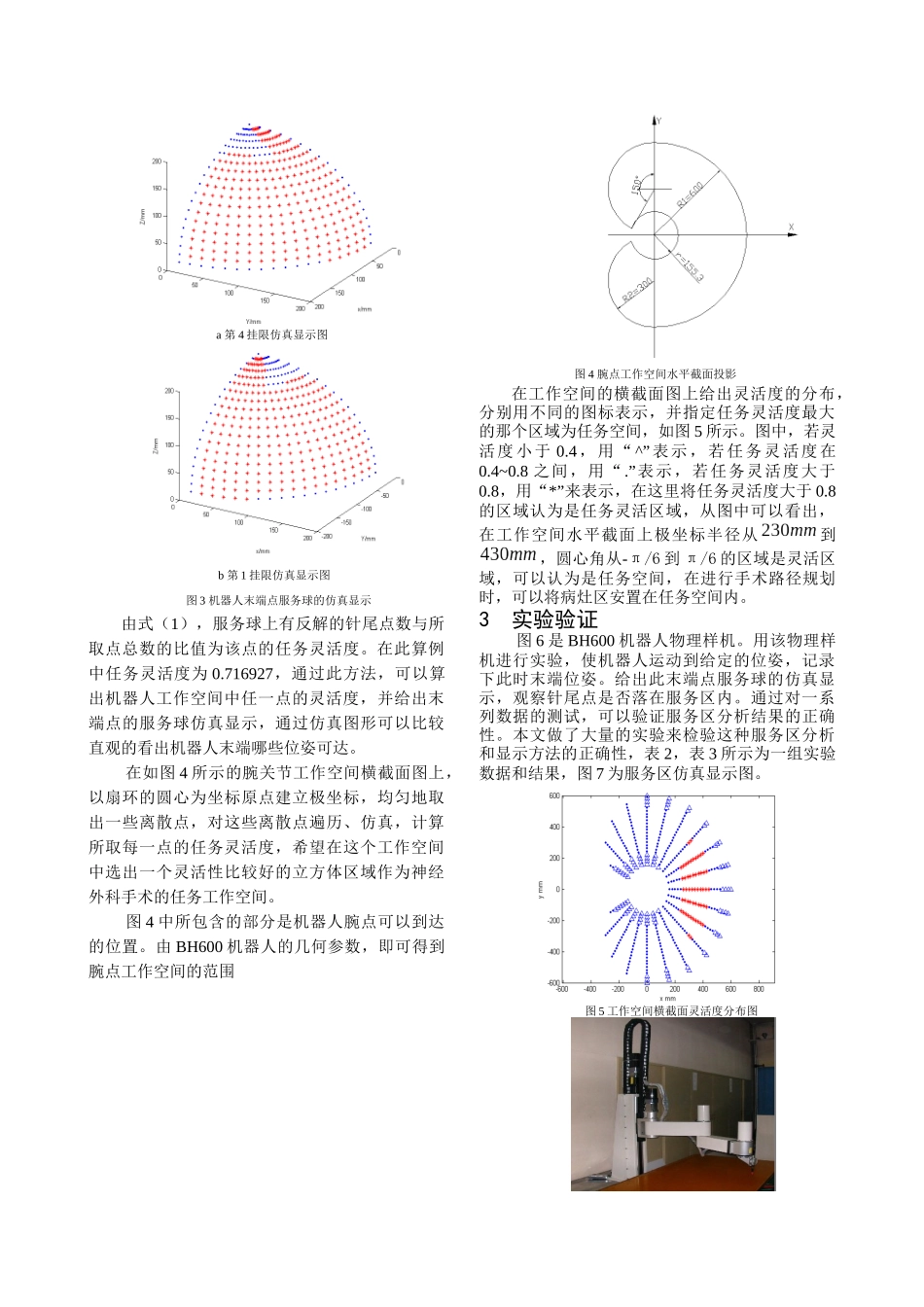
神经外科手术机器人灵活性分析邢宏光王利红(北京航空航天大学机械工程及自动化学院,北京100083)(郑州航空工业管理学院机电工程系,郑州450015)张玉茹(北京航空航天大学机械工程及自动化学院,北京100083)摘要:开发了用于神经外科手术的五自由度机器人BH600。从神经外科立体定向手术的需求出发,分析了该机器人的灵活性。用服务球和服务区概念给出了五自由度机器人工作空间任意点的灵活度定义,提出了工作空间灵活性的分析方法。通过数值计算和图形显示给出了工作空间的灵活度分布,采用机器人物理样机进行实验,对分析结果进行了验证。掌握灵活度的空间分布,可以为手术路径规划提供可靠的依据。关键词:机器人;运动学;医疗机器人系统;灵活工作空间中图分类号:TP206+.1文献标识码:A文章编号:1001-5965(2004)04--DexterityanalysisofrobotforneurosurgeryXingHongguang(SchoolofMechanicalEngineeringandAutomation,BeijingUniversityofAeronauticsandAstronautics,Beijing100083,China)WangLihong(Departmentofmechanical-electricalengineering,ZhengZhouInstituteofAeronauticalIndustryManagement,Zhengzhou,450015,China)ZhangYuru(SchoolofMechanicalEngineeringandAutomation,BeijingUniversityofAeronauticsandAstronautics,Beijing100083,China)Abstract:MinimalinvasivesurgeryassistedrobotwasdevelopedinRoboticsInstituteinBeijingUniversityofAeronauticsandAstronautics.Basedontherequirementofneurologicalstereotacticsurgery,dexterityoftherobotwasanalyzed.Firstly,usingconceptofservicesphereandservicesection,definitionofdexteritywasproposedatanypointinsidetheworkspaceofthefivedegree-of-freedomrobot;then,analysismethodofworkspacedexteritywasproposed.Dexteritydistributionwithintheworkspacewasgivenusingnumericalanalysisandgraphicaldisplay,andtheresultwasverifiedthroughexperimentontherobotphysicalprototype.Withthehelpofdexteritydistributioninworkspace,reliablereferencecanbesuppliedforsurgeryoperationplanning.Keywords:robots;kinematics;medicalroboticsystem;dexterousworkspace机器人辅助外科手术技术是机器人技术的一个新领域,这一领域对于医学研究和机器人技术的发展有着重要的意义。在外科手术中受益于机器人的一个应用是微创外科手术[1]。所谓微创外科手术是指医生借助于各种视觉图像的引导,将手术器械沿着事先规划好的手术路径,经过小切口送入病人体内进行观察或治疗,从而最大程度地减小创伤、减轻痛苦。在神经外科立体定向手术中,机器人系统的作用是实现空间的准确定位,即按医生规划的手术路径,到达指定的空间位姿,辅助医生进行穿刺。由于患者颅内病灶区位置不确定,因此需要机器人末端穿刺针能实现尽可能多的姿态,即要求机器人有很好的灵活性。通常意义上,灵活工作空间是指机器人末端能以任意姿态到达的空间点的集合。灵活工作空间可以用机器人末端参考点的服务球和服务区来描述[2,3]。机器人有灵活工作空间的条件是其手腕的3个关节轴相互垂直且相交于一点。对于运动学反解有解析表达式的机器人,可以给出其灵活工作空间边界的表达式[4],或者用代数方法和几何方法分析其灵活性[5,6]。对于复杂结构的机器人,则需要提出其它通用和直观的分析方法。本文以北京航空航天大学机器人研究所开发的神经外科手术机器人BH600为研究对象,提出了五自由度机器人灵活空间分析的一般方法。BH600的逆运动学没有解析解,也难以给出灵活工作空间的解析表达式。首先定义了五自由度机器人的灵活度,然后用服务球和服务区直观地显收稿日期:基金项目:国家863基金资助项目(2001AA422110)作者简介:邢宏光(1976-),男,辽宁鞍山人,硕士生,xhg1130@sina.com示了任意点的灵活度,以及工作空间的灵活度分布。最后通过对BH600物理样机进行实验,验证了灵活性分析结果的正确性。1BH600机器人结构BH600机器人机构简图如图1所示。此机器人具有5个自由度。第1关节为移动副,其余关节为转动副,腕关节的转轴...