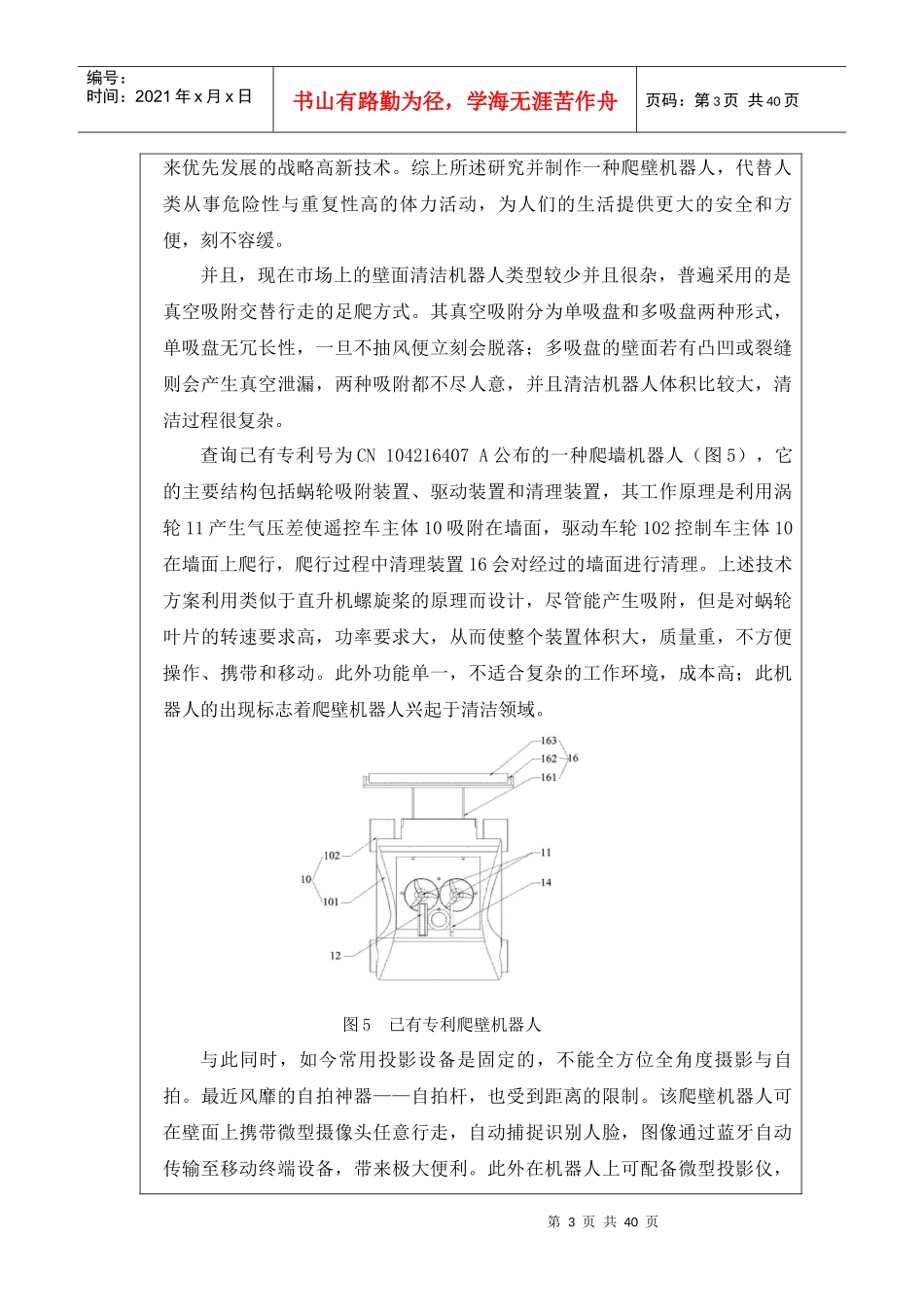
第1页共40页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页共40页湖南省大学生研究性学习和创新性实验计划项目申报表项目名称:多功能爬壁机器人学校名称湖南大学学生姓名专业性别入学年份金睿工程力学男2013李雷机械设计制造及其自动化男2012王琨淇机械设计制造及其自动化男2012韩进华机械设计制造及其自动化男2012指导教师金秋谈职称副教授学科专业机械设计理论学生曾经参与科研的情况湖南省工程模型设计制作大赛获省级二等奖大学生工程能力训练大赛获省级三等奖挑战杯湖南大学校赛获校级一等奖指导教师承担科研课题情况1995-2003参与小型水稻联合收割机研发,通过省级成果鉴定,2002年参与类菱形新概念成研发,2006年参与四轮三轴月球车的结构设计及着陆器的结构设计;本项目为教育部的重点项目。2008年参与无人驾驶汽车机械结构设改造设计;获全国智能车大赛冠军。2010年参与中气子项“基于新概念通用底盘的关键技术研究”,2014年主持重庆市“151”汽车产业升级转型重大专项-C级车AMT变速箱摘挂挡及离合器执行器开发,2006年指导学生参与全国第二届大学生机械设计创新大赛,项目获国家级三等奖,2011级评为优秀毕业设计指导老第2页共40页第1页共40页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第2页共40页师,2012年第五届全国大学生机械设计创新大赛二等奖,2012年获全国大学生挑战杯银奖。2013年获全国大学生挑战杯省赛二等奖。指导SIT国家级重点项目五项,组织第五届、第六届全国大学生机械创新设计大赛湖南大学选拔赛,两项发明专利(第一作者)。项目研究和实验的目的、内容和要解决的主要问题1、项目研究的目的和要解决的主要问题:现代城市高楼林立,采用的瓷砖或玻璃结构的大厦壁面常年裸露在外,需要进行维护和清洁。通过查阅相关文献资料和实地调研发现,迄今为止,这类工作仍由人工搭乘吊篮完成,不仅效率低、成本高,而且对人身安全和大楼壁面构成极大威胁,下图中的“蜘蛛侠”想必我们已经司空见惯。图1瓷砖墙壁图2玻璃幕墙图3人工高空外墙清洗图4城市蜘蛛侠并且随着科学技术的发展,生活趋向自动化、智能化,琳琅满目的机器人有效地提高了生产、生活效率,改进生产、生活质量。同时在《国家中长期科学和技术发展规划纲要(2006-2020年)》中,明确指出将机器人作为未第3页共40页第2页共40页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第3页共40页来优先发展的战略高新技术。综上所述研究并制作一种爬壁机器人,代替人类从事危险性与重复性高的体力活动,为人们的生活提供更大的安全和方便,刻不容缓。并且,现在市场上的壁面清洁机器人类型较少并且很杂,普遍采用的是真空吸附交替行走的足爬方式。其真空吸附分为单吸盘和多吸盘两种形式,单吸盘无冗长性,一旦不抽风便立刻会脱落;多吸盘的壁面若有凸凹或裂缝则会产生真空泄漏,两种吸附都不尽人意,并且清洁机器人体积比较大,清洁过程很复杂。查询已有专利号为CN104216407A公布的一种爬墙机器人(图5),它的主要结构包括蜗轮吸附装置、驱动装置和清理装置,其工作原理是利用涡轮11产生气压差使遥控车主体10吸附在墙面,驱动车轮102控制车主体10在墙面上爬行,爬行过程中清理装置16会对经过的墙面进行清理。上述技术方案利用类似于直升机螺旋桨的原理而设计,尽管能产生吸附,但是对蜗轮叶片的转速要求高,功率要求大,从而使整个装置体积大,质量重,不方便操作、携带和移动。此外功能单一,不适合复杂的工作环境,成本高;此机器人的出现标志着爬壁机器人兴起于清洁领域。图5已有专利爬壁机器人与此同时,如今常用投影设备是固定的,不能全方位全角度摄影与自拍。最近风靡的自拍神器——自拍杆,也受到距离的限制。该爬壁机器人可在壁面上携带微型摄像头任意行走,自动捕捉识别人脸,图像通过蓝牙自动传输至移动终端设备,带来极大便利。此外在机器人上可配备微型投影仪,第4页共40页第3页共40页编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第4页共40页通过控制系统输入源文件,经过融合调试,组建成显示系统。随着机器人运...