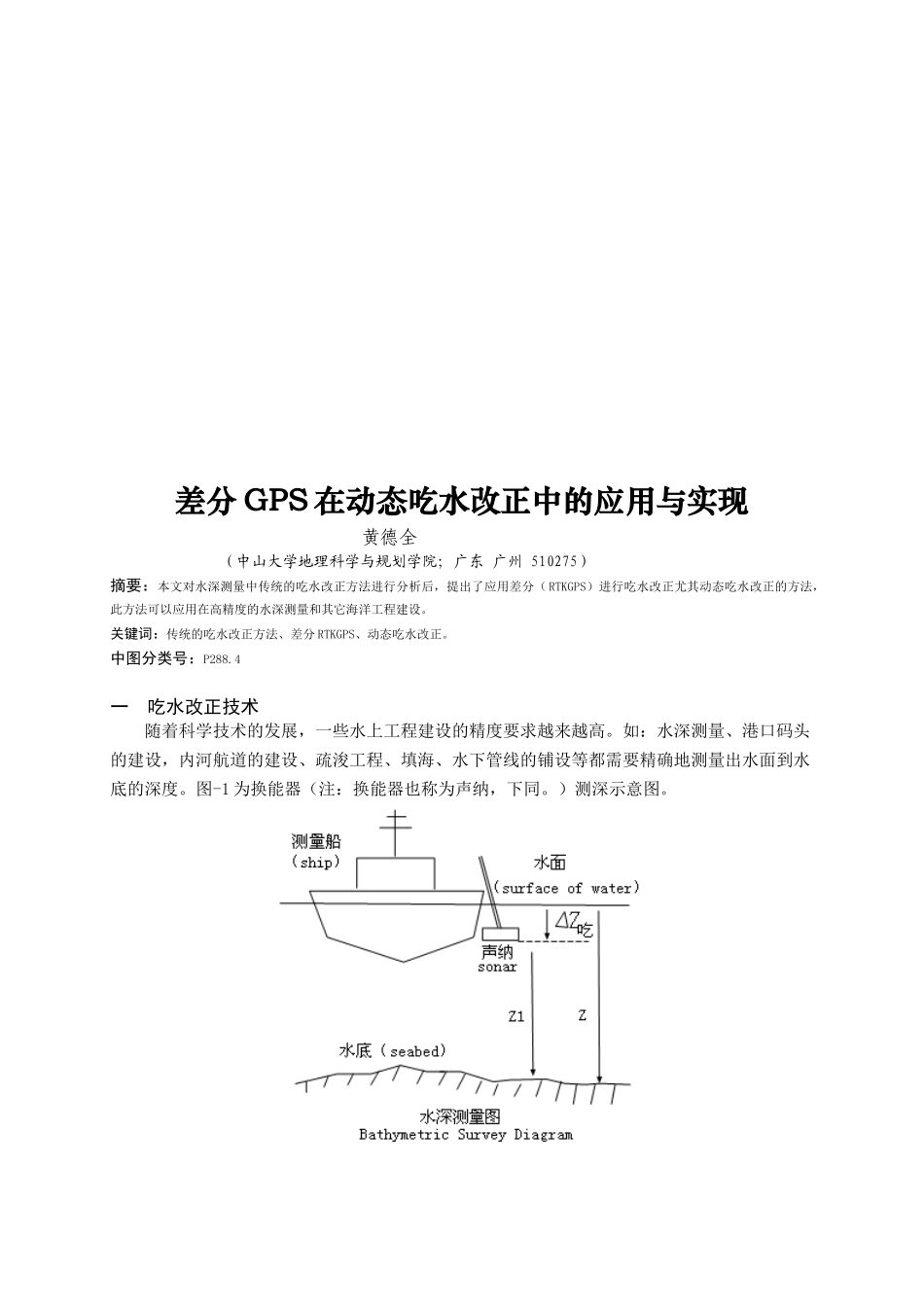
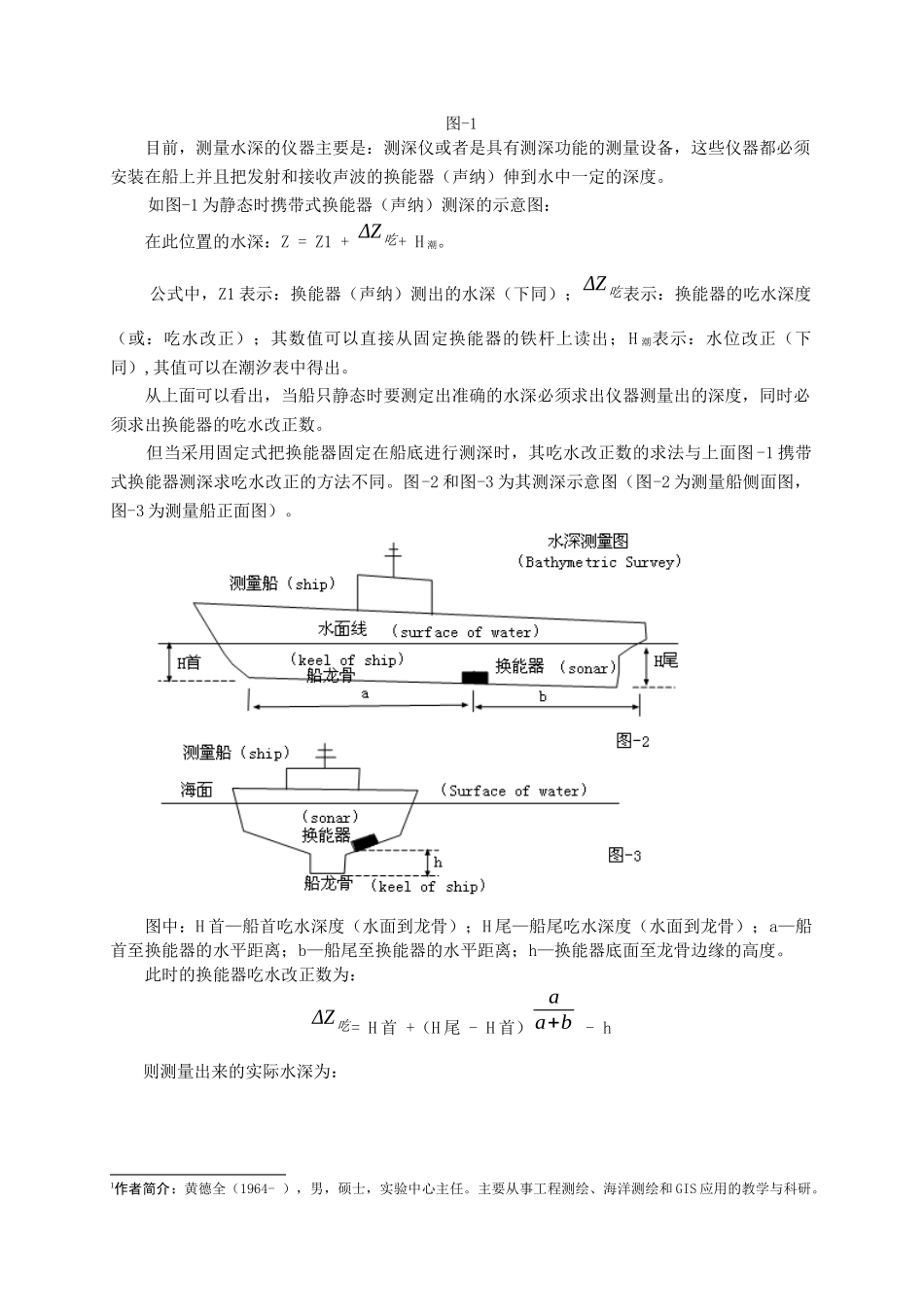
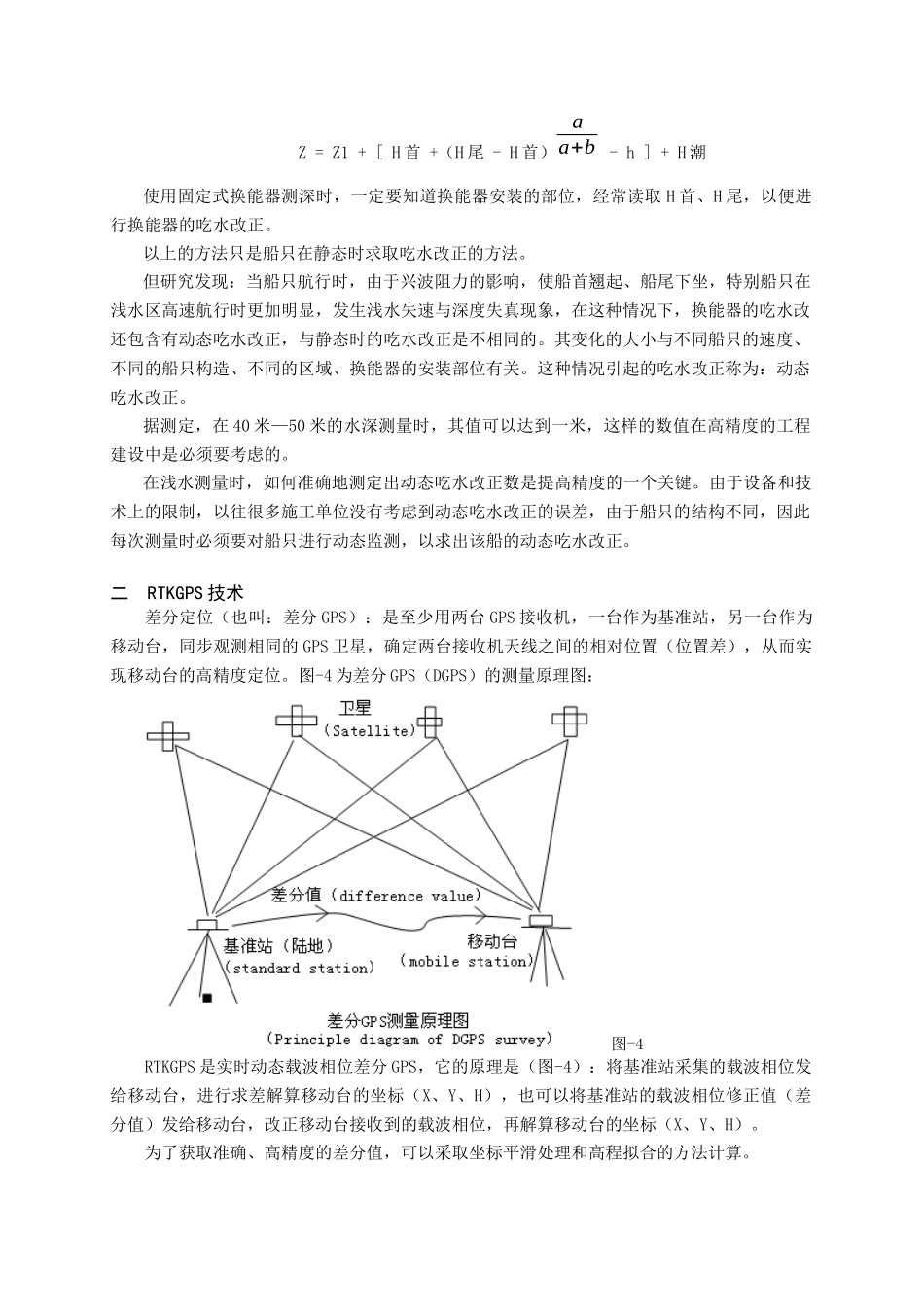
差分GPS在动态吃水改正中的应用与实现黄德全(中山大学地理科学与规划学院;广东广州510275)摘要:本文对水深测量中传统的吃水改正方法进行分析后,提出了应用差分(RTKGPS)进行吃水改正尤其动态吃水改正的方法,此方法可以应用在高精度的水深测量和其它海洋工程建设。关键词:传统的吃水改正方法、差分RTKGPS、动态吃水改正。中图分类号:P288.4一吃水改正技术随着科学技术的发展,一些水上工程建设的精度要求越来越高。如:水深测量、港口码头的建设,内河航道的建设、疏浚工程、填海、水下管线的铺设等都需要精确地测量出水面到水底的深度。图-1为换能器(注:换能器也称为声纳,下同。)测深示意图。图-1目前,测量水深的仪器主要是:测深仪或者是具有测深功能的测量设备,这些仪器都必须安装在船上并且把发射和接收声波的换能器(声纳)伸到水中一定的深度。如图-1为静态时携带式换能器(声纳)测深的示意图:在此位置的水深:Z=Z1+ΔZ吃+H潮。1公式中,Z1表示:换能器(声纳)测出的水深(下同);ΔZ吃表示:换能器的吃水深度(或:吃水改正);其数值可以直接从固定换能器的铁杆上读出;H潮表示:水位改正(下同),其值可以在潮汐表中得出。从上面可以看出,当船只静态时要测定出准确的水深必须求出仪器测量出的深度,同时必须求出换能器的吃水改正数。但当采用固定式把换能器固定在船底进行测深时,其吃水改正数的求法与上面图-1携带式换能器测深求吃水改正的方法不同。图-2和图-3为其测深示意图(图-2为测量船侧面图,图-3为测量船正面图)。图中:H首—船首吃水深度(水面到龙骨);H尾—船尾吃水深度(水面到龙骨);a—船首至换能器的水平距离;b—船尾至换能器的水平距离;h—换能器底面至龙骨边缘的高度。此时的换能器吃水改正数为:ΔZ吃=H首+(H尾-H首)aa+b-h则测量出来的实际水深为:1作者简介:黄德全(1964-),男,硕士,实验中心主任。主要从事工程测绘、海洋测绘和GIS应用的教学与科研。Z=Z1+[H首+(H尾-H首)aa+b-h]+H潮使用固定式换能器测深时,一定要知道换能器安装的部位,经常读取H首、H尾,以便进行换能器的吃水改正。以上的方法只是船只在静态时求取吃水改正的方法。但研究发现:当船只航行时,由于兴波阻力的影响,使船首翘起、船尾下坐,特别船只在浅水区高速航行时更加明显,发生浅水失速与深度失真现象,在这种情况下,换能器的吃水改还包含有动态吃水改正,与静态时的吃水改正是不相同的。其变化的大小与不同船只的速度、不同的船只构造、不同的区域、换能器的安装部位有关。这种情况引起的吃水改正称为:动态吃水改正。据测定,在40米—50米的水深测量时,其值可以达到一米,这样的数值在高精度的工程建设中是必须要考虑的。在浅水测量时,如何准确地测定出动态吃水改正数是提高精度的一个关键。由于设备和技术上的限制,以往很多施工单位没有考虑到动态吃水改正的误差,由于船只的结构不同,因此每次测量时必须要对船只进行动态监测,以求出该船的动态吃水改正。二RTKGPS技术差分定位(也叫:差分GPS):是至少用两台GPS接收机,一台作为基准站,另一台作为移动台,同步观测相同的GPS卫星,确定两台接收机天线之间的相对位置(位置差),从而实现移动台的高精度定位。图-4为差分GPS(DGPS)的测量原理图:图-4RTKGPS是实时动态载波相位差分GPS,它的原理是(图-4):将基准站采集的载波相位发给移动台,进行求差解算移动台的坐标(X、Y、H),也可以将基准站的载波相位修正值(差分值)发给移动台,改正移动台接收到的载波相位,再解算移动台的坐标(X、Y、H)。为了获取准确、高精度的差分值,可以采取坐标平滑处理和高程拟合的方法计算。1.坐标平滑处理在至少已知2或3个点的坐标、高程前提下进行。如图—5:O1X1Y1Z1和O2X2Y2Z2为转换前后的坐标系统,两个坐标系相互间的旋转角为:x、y、z。图—5三维直角坐标系之间的转换由于坐标轴之间的旋转,旋转角为x、y、z所引起的坐标变换如下:X2=(cosΩycosΩz−sinΩxsinΩysinΩz)X1+(sinΩzcosΩy−sinΩxsinΩycosΩz)Y1−(sinΩycosΩz)Z1(1)Y2=−(sinΩzcosΩz)X1+(cosΩz...