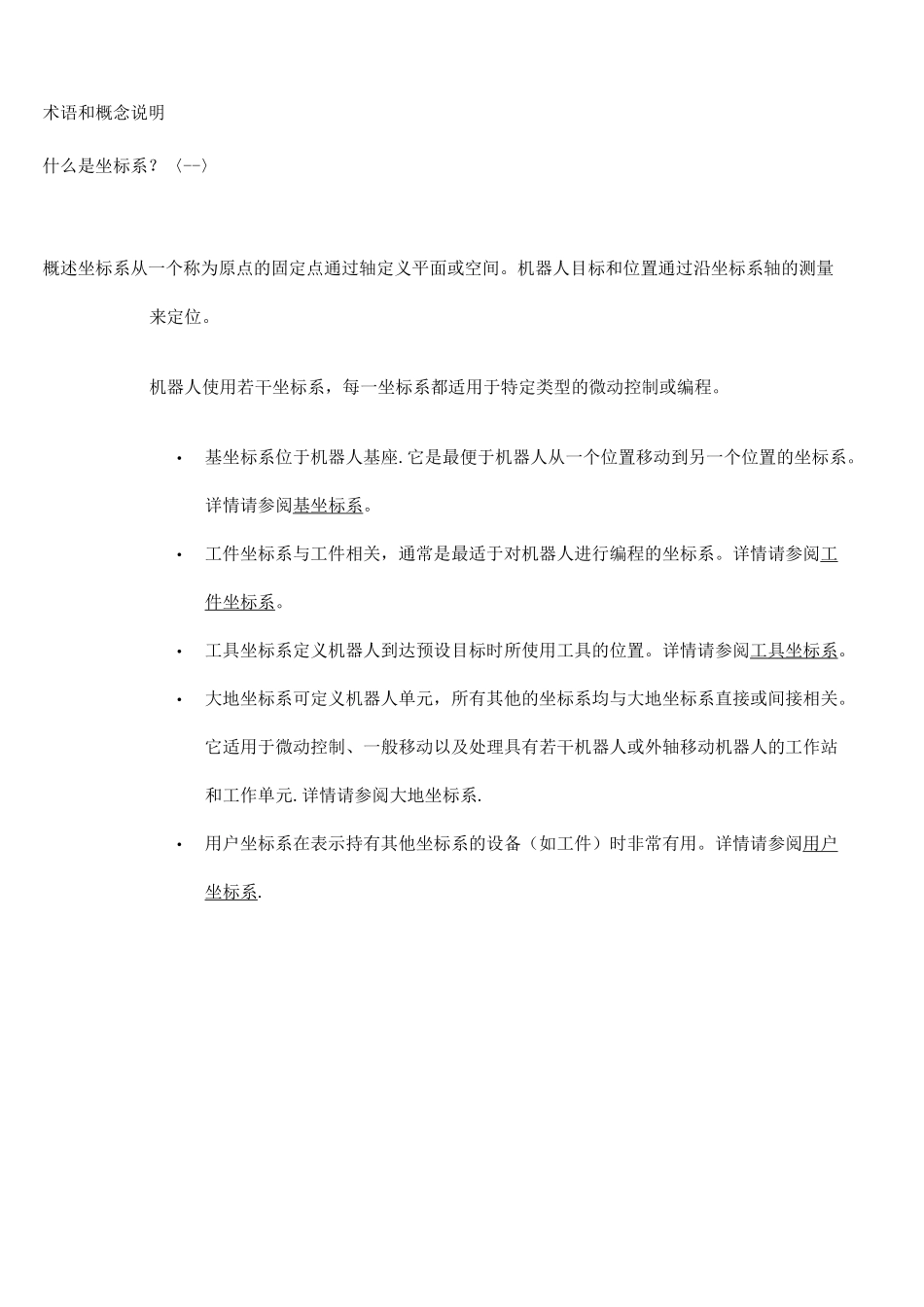
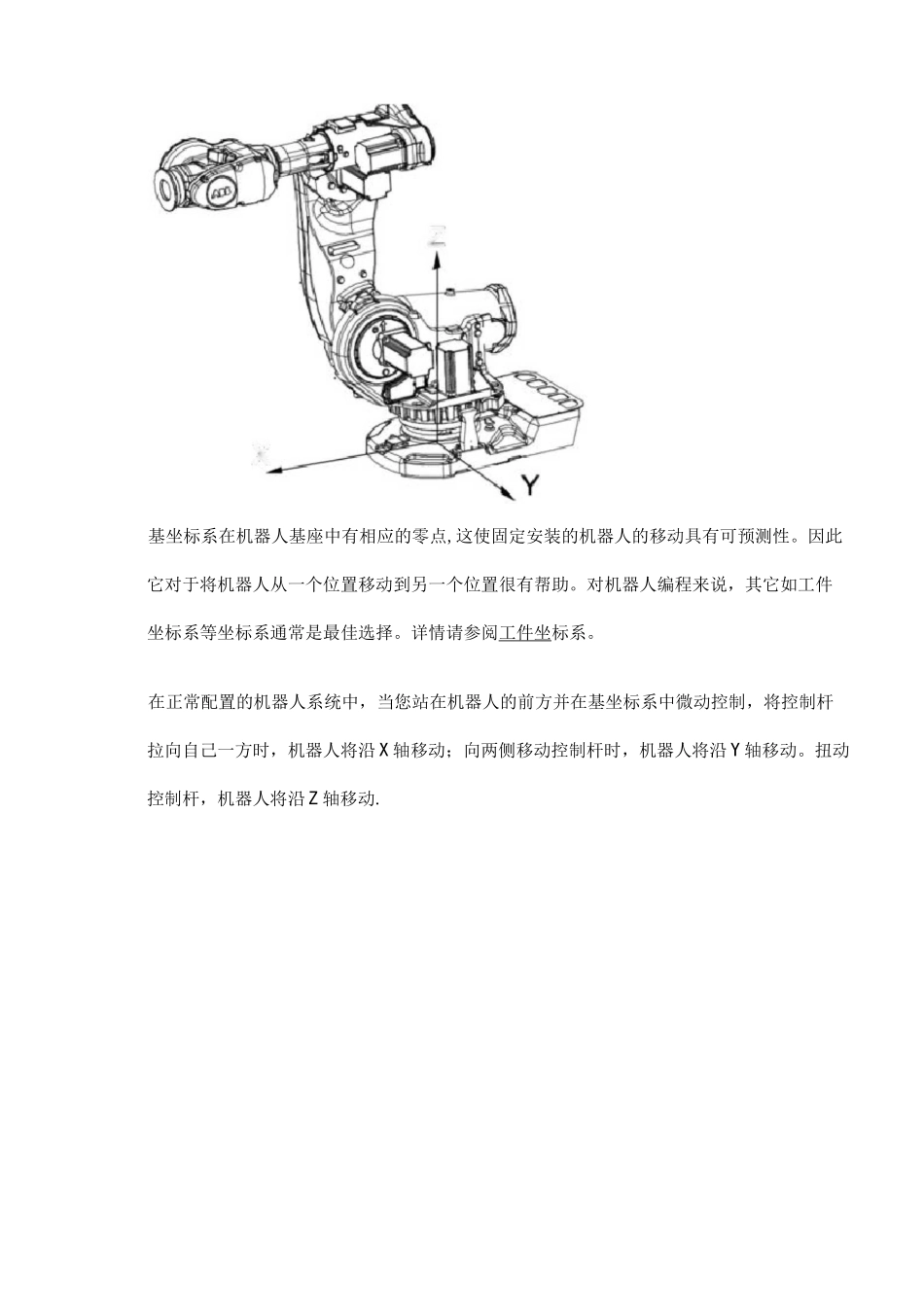
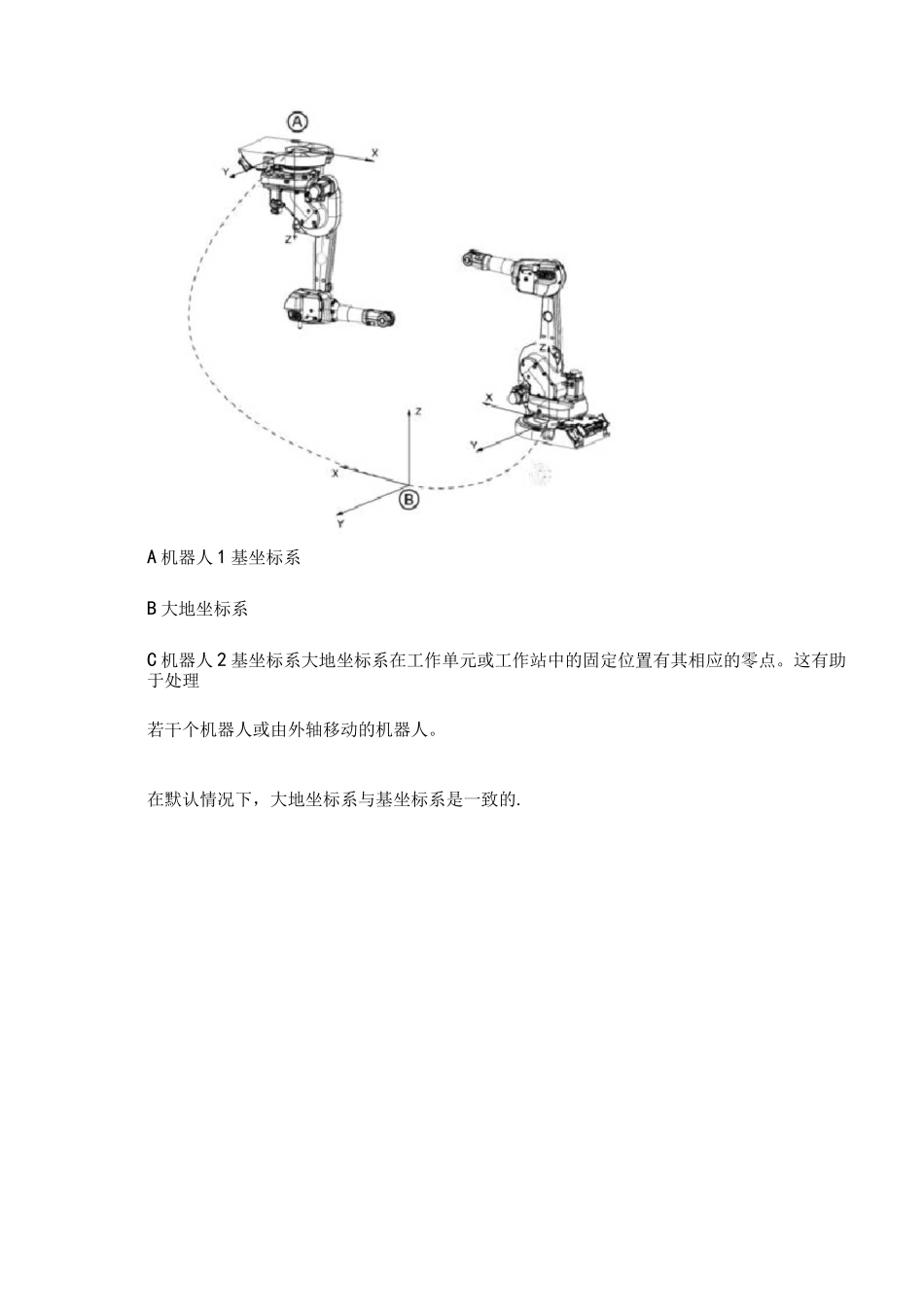
术语和概念说明什么是坐标系?〈--〉概述坐标系从一个称为原点的固定点通过轴定义平面或空间。机器人目标和位置通过沿坐标系轴的测量来定位。机器人使用若干坐标系,每一坐标系都适用于特定类型的微动控制或编程。•基坐标系位于机器人基座.它是最便于机器人从一个位置移动到另一个位置的坐标系。详情请参阅基坐标系。•工件坐标系与工件相关,通常是最适于对机器人进行编程的坐标系。详情请参阅工件坐标系。•工具坐标系定义机器人到达预设目标时所使用工具的位置。详情请参阅工具坐标系。•大地坐标系可定义机器人单元,所有其他的坐标系均与大地坐标系直接或间接相关。它适用于微动控制、一般移动以及处理具有若干机器人或外轴移动机器人的工作站和工作单元.详情请参阅大地坐标系.•用户坐标系在表示持有其他坐标系的设备(如工件)时非常有用。详情请参阅用户坐标系.基坐标系在机器人基座中有相应的零点,这使固定安装的机器人的移动具有可预测性。因此它对于将机器人从一个位置移动到另一个位置很有帮助。对机器人编程来说,其它如工件坐标系等坐标系通常是最佳选择。详情请参阅工件坐标系。在正常配置的机器人系统中,当您站在机器人的前方并在基坐标系中微动控制,将控制杆拉向自己一方时,机器人将沿 X 轴移动;向两侧移动控制杆时,机器人将沿 Y 轴移动。扭动控制杆,机器人将沿 Z 轴移动.ZX基坐标系A 机器人 1 基坐标系B 大地坐标系C 机器人 2 基坐标系大地坐标系在工作单元或工作站中的固定位置有其相应的零点。这有助于处理若干个机器人或由外轴移动的机器人。在默认情况下,大地坐标系与基坐标系是一致的.0©大地坐标系B 工件坐标系 1C 工件坐标系 2工件坐标系对应工件:它定义工件相对于大地坐标系(或其它坐标系)的位置。工件坐标系必须定义于两个框架:用户框架(与大地基座相关)和工件框架(与用户框架相关)。机器人可以拥有若干工件坐标系,或者表示不同工件,或者表示同一工件在不同位置的若干副本.您对机器人进行编程时就是在工件坐标系中创建目标和路径.这带来很多优©工件坐标系点::/、、、・••重新定位工作站中的工件时,您只需更改工件坐标系的位置,所有路径将即刻随之更新。•允许操作以外轴或传送导轨移动的工件,因为整个工件可连同其路径一起移动.B 工件坐标系C 新位置D 位移坐标系有时,会在若干位置对同一对象或若干相邻工件执行同一路径。为了避免每次都必须为所有位置编程,可以定义一个位移...