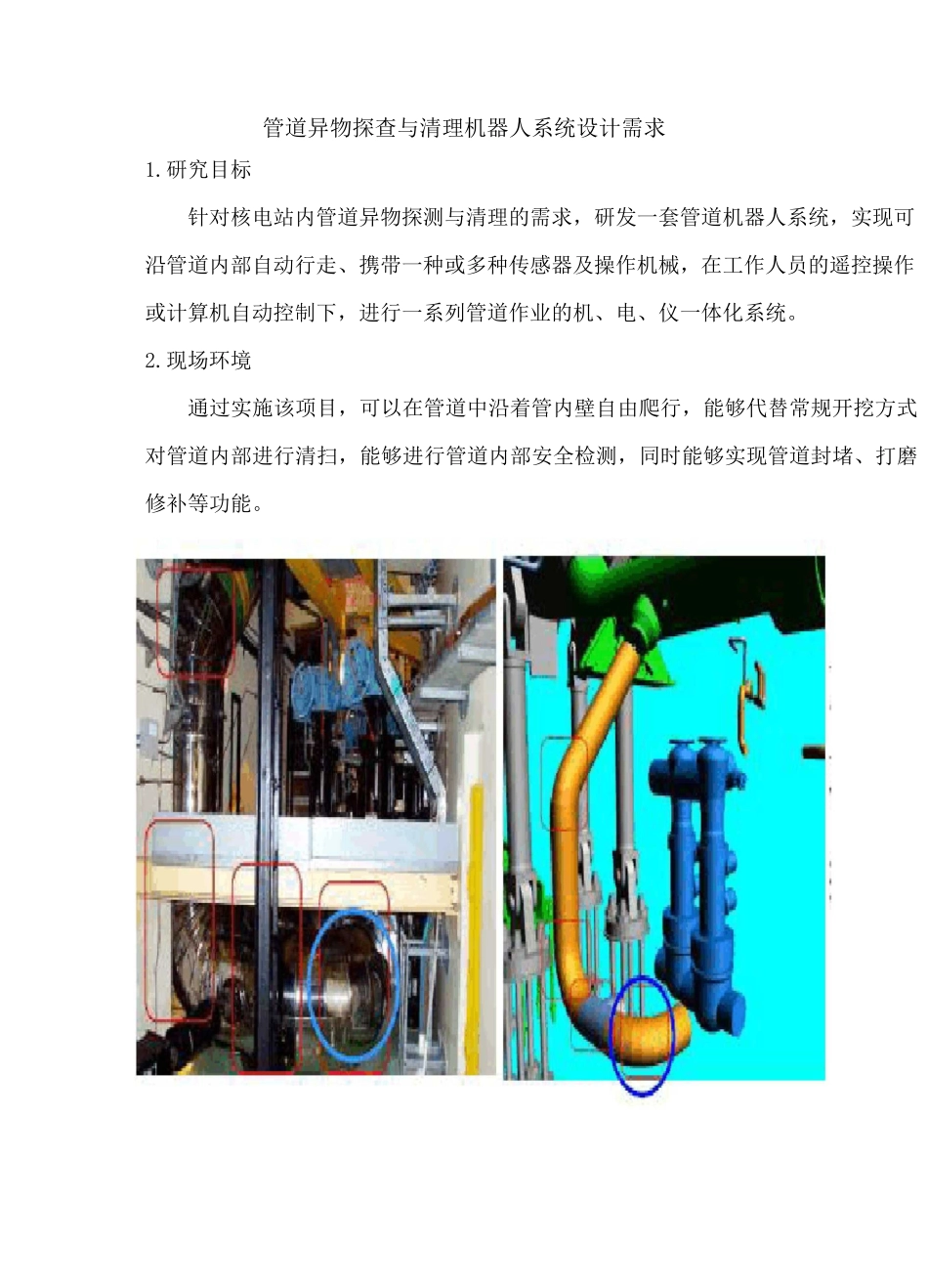
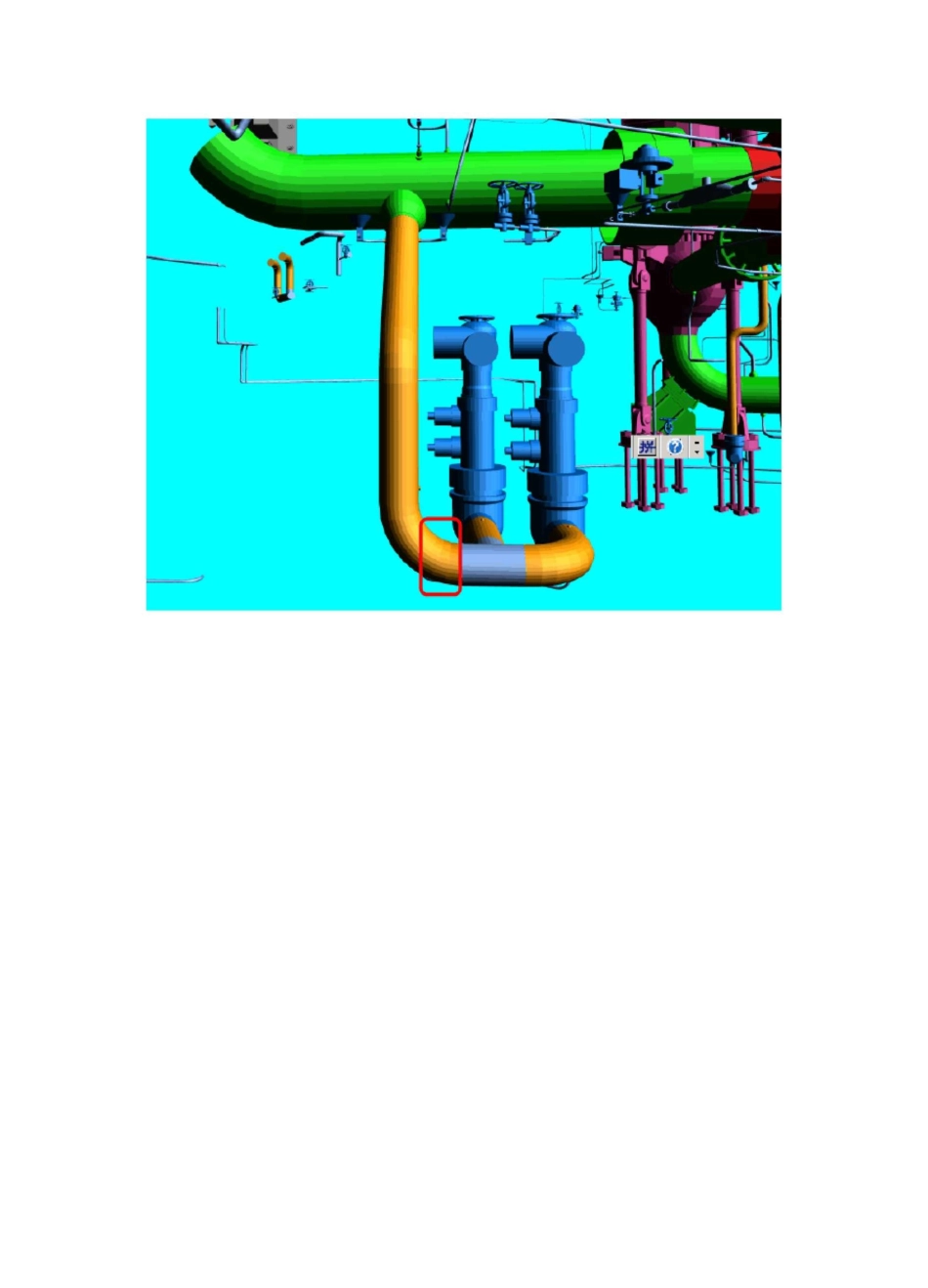
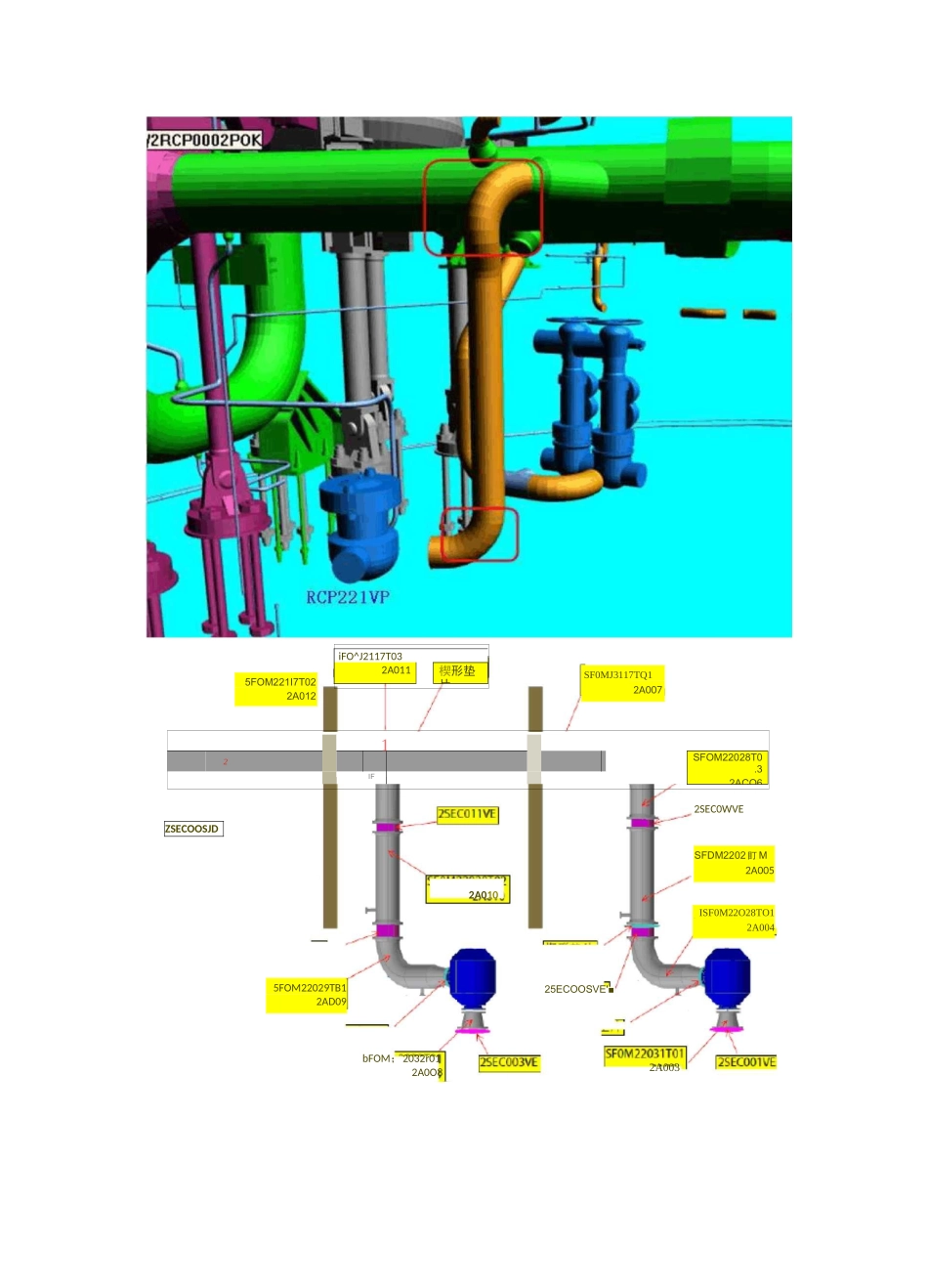
管道异物探查与清理机器人系统设计需求1.研究目标针对核电站内管道异物探测与清理的需求,研发一套管道机器人系统,实现可沿管道内部自动行走、携带一种或多种传感器及操作机械,在工作人员的遥控操作或计算机自动控制下,进行一系列管道作业的机、电、仪一体化系统。2.现场环境通过实施该项目,可以在管道中沿着管内壁自由爬行,能够代替常规开挖方式对管道内部进行清扫,能够进行管道内部安全检测,同时能够实现管道封堵、打磨修补等功能。iFO^J2117T032A011楔形垫片SF0MJ3117TQ12A0071■2SFOM22028T0.32ACO6IF5FOM221I7T022A012ZSECOOSJD2SEC0WVE2A003SFDM2202 盯 M2A005ISF0M22O28TO12A0045FOM22029TB12AD09bFOM;2032r012A0O82A01025ECOOSVE'■切建切閃|2AO19JyONSlOS^TW2MU3. 关键技术口管道爬行机器人可以自动适应直径 150mm-600mm 的不同管径口机器人在管道内爬行距离不小于 50 米;口机器人爬行速度不小于 0.2m/s,连续工作时间不小于 lh;口机器人图像采集像素不低于 720P;口可用工作环境温度 5-60°C;口可在 40C,95%的相对湿度下,连续稳定工作 24h 以上;口满足 IEC60068-2-11:1981 耐腐蚀性要求;口满足 IEC60068-2-30:2005 抗振动性能要求;口耐辐射剂量率 1000rad/h,累计耐辐射剂量 10000rad;口末端执行器的负载不低于 500g。4. 技术性能指标1) 通用供电电压为 AC380V 或者 AC220V 电源,,不间断续航时间为4h;2) 三类水下摄像系统,分别具有高耐辐照能力、彩色高清性能和高帧频能力,都可变倍调焦,其具体参数如下:口高耐辐照摄像系统性能参数:•最大剂量率:$1X106rad/h,累积剂量:$1X108rads•光学变焦:上 6 倍•水平分辨率:上 500 电视线•最低照度优于 10Lux•云台转角范围:俯仰土 30°水平土 45°•图像采集像素不低于 720P。口彩色高清摄像系统性能参数:•最大剂量率:$lX104rad/h,累积剂量:$lX106rads•光学变焦:上 24 倍(20 或 28 倍);•图像像素:上 143 万;•最低照度优于 0.2lux;•云台转角范围:俯仰土 45°水平土 60°•图像采集像素不低于 720P。口高帧频摄像系统性能参数:•最大剂量率:$lX103rad/h;累积剂量:$lX105rads•光学变焦:上 6 倍•最低照度优于 0.2Lux;•帧频:$80fps;•云台转角范围:俯仰土 45°;水平土 60°•图像采集像素不低于 720P。3)智能末端抓取工具口夹取式机械手:•抓取异物(为形状规则或不规则的中小物体...