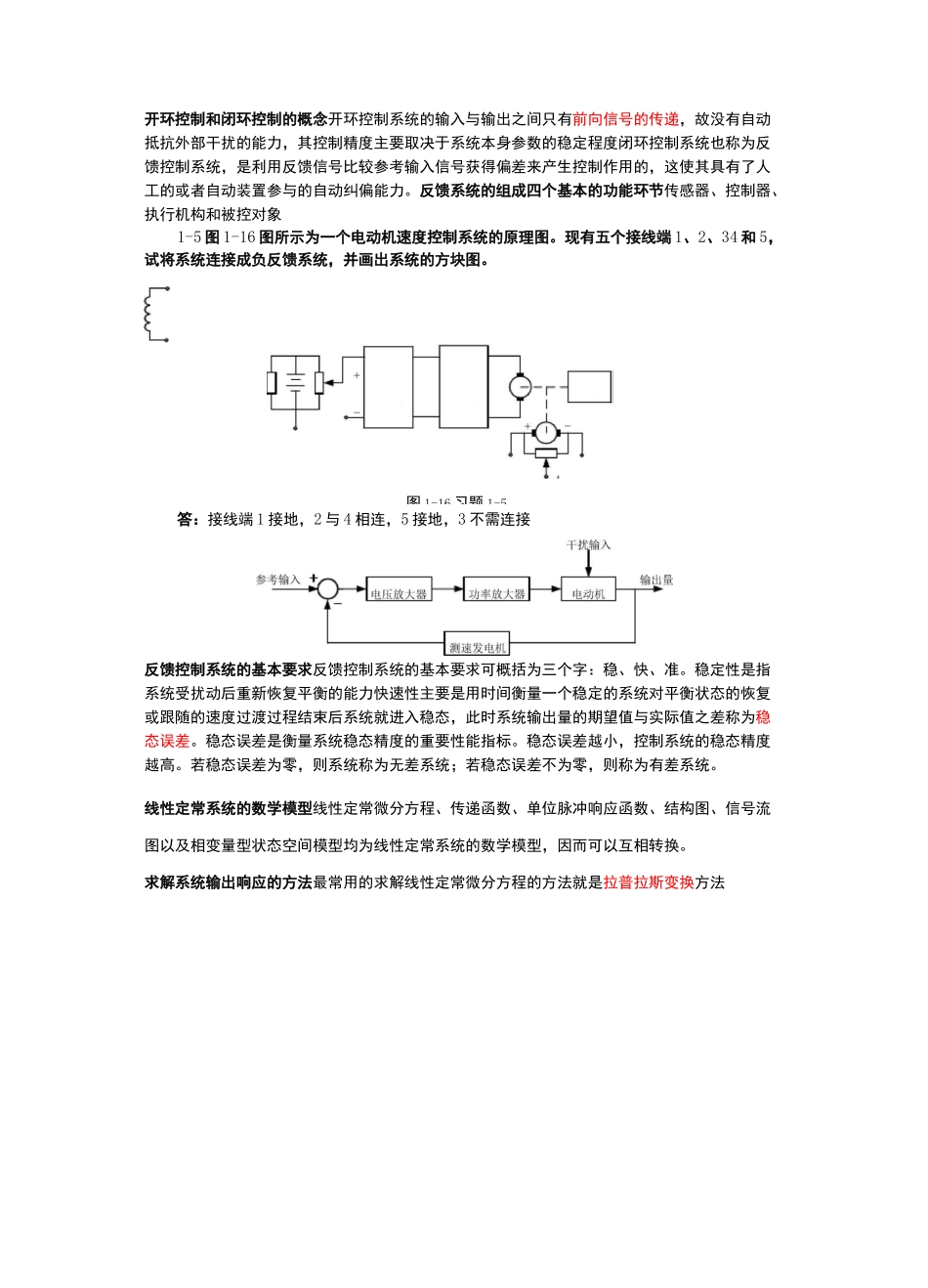
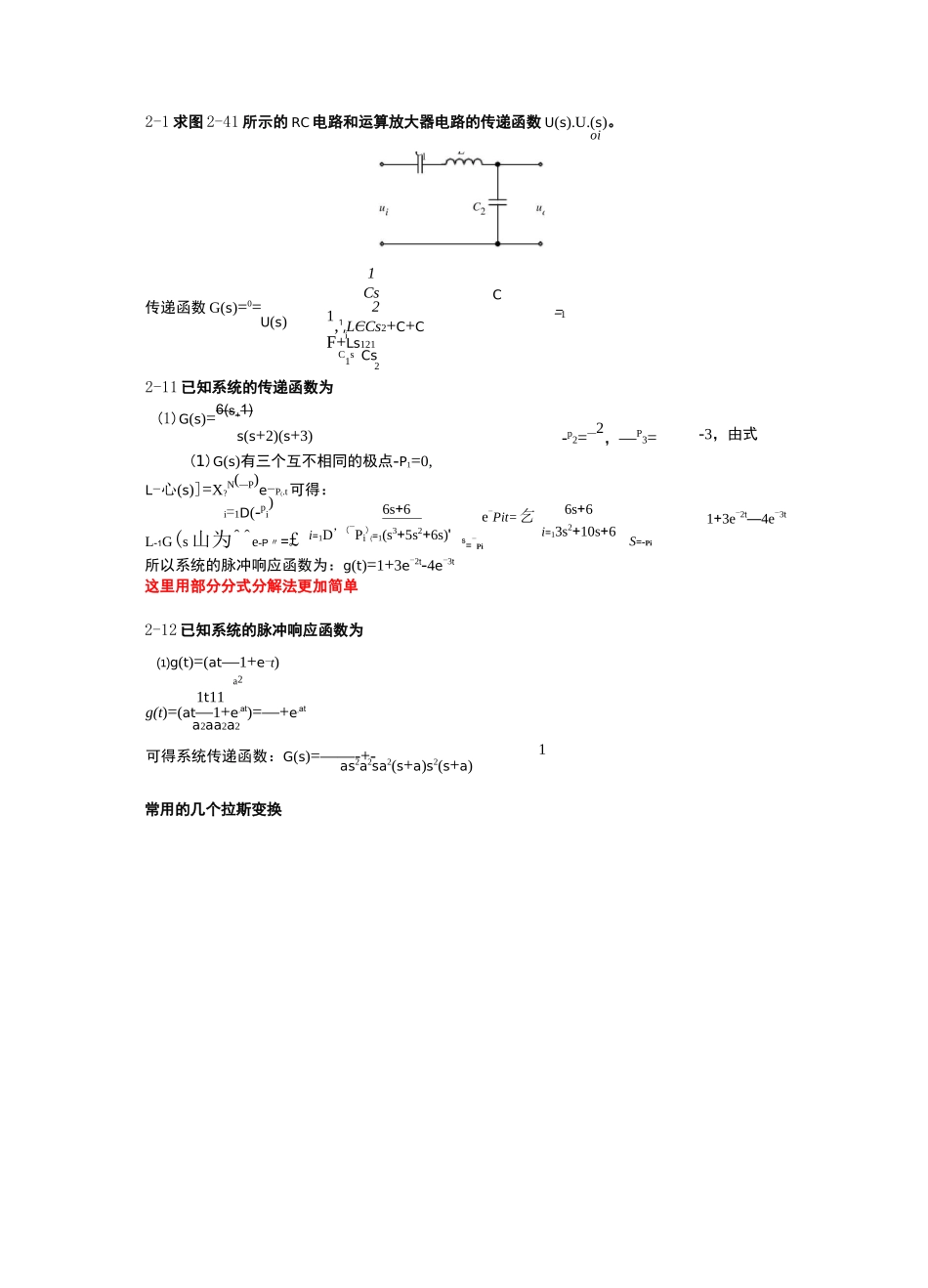
1235功率放大器电压放大负图 1-16 习题 1-5开环控制和闭环控制的概念开环控制系统的输入与输出之间只有前向信号的传递,故没有自动抵抗外部干扰的能力,其控制精度主要取决于系统本身参数的稳定程度闭环控制系统也称为反馈控制系统,是利用反馈信号比较参考输入信号获得偏差来产生控制作用的,这使其具有了人工的或者自动装置参与的自动纠偏能力。反馈系统的组成四个基本的功能环节传感器、控制器、执行机构和被控对象1-5 图 1-16 图所示为一个电动机速度控制系统的原理图。现有五个接线端 1、2、34 和 5,试将系统连接成负反馈系统,并画出系统的方块图。答:接线端 1 接地,2 与 4 相连,5 接地,3 不需连接反馈控制系统的基本要求反馈控制系统的基本要求可概括为三个字:稳、快、准。稳定性是指系统受扰动后重新恢复平衡的能力快速性主要是用时间衡量一个稳定的系统对平衡状态的恢复或跟随的速度过渡过程结束后系统就进入稳态,此时系统输出量的期望值与实际值之差称为稳态误差。稳态误差是衡量系统稳态精度的重要性能指标。稳态误差越小,控制系统的稳态精度越高。若稳态误差为零,则系统称为无差系统;若稳态误差不为零,则称为有差系统。线性定常系统的数学模型线性定常微分方程、传递函数、单位脉冲响应函数、结构图、信号流图以及相变量型状态空间模型均为线性定常系统的数学模型,因而可以互相转换。求解系统输出响应的方法最常用的求解线性定常微分方程的方法就是拉普拉斯变换方法12-1 求图 2-41 所示的 RC 电路和运算放大器电路的传递函数 U(s).U.(s)。oiC=11Cs2_传递函数 G(s)=0=U(s)iC1s2-11 已知系统的传递函数为(1)G(s)=6(s+1)s(s+2)(s+3)(1)G(s)有三个互不相同的极点-P1=0,L-心(s)]=X?N(—P)e-P(.t可得:i=1D(-pi)L-1G(s山为^^e-P〃=£1,1,LCCs2+C+CF+Ls121Cs26s+6i=1D,(-Pi){=1(s3+5s2+6s)'e-Pit=乞s=-Pi所以系统的脉冲响应函数为:g(t)=1+3e-2t-4e-3t这里用部分分式分解法更加简单2-12 已知系统的脉冲响应函数为⑴g(t)=(at—1+e—t)a21t11g(t)=(at—1+e-at)=—+e-ata2aa2a2可得系统传递函数:G(s)=——-+-常用的几个拉斯变换-p2=—2,―P3=6s+6i=13s2+10s+6S=-Pi-3,由式1+3e-2t—4e-3tas2a2sa2(s+a)s2(s+a)闭环传递函数的极点和系统稳定性的关系删镯£训鞫紐 igQ 躺 E 釣熄辭吐難麟-附带壕镯帚鶴I 冯荀稚毅仙敬刊怫 J.备饕 U 钮 J 即犁】同佻褲負九_z»slBS&w^鄴艮划陨=⑷fAd〜帯窃鮭站址(...