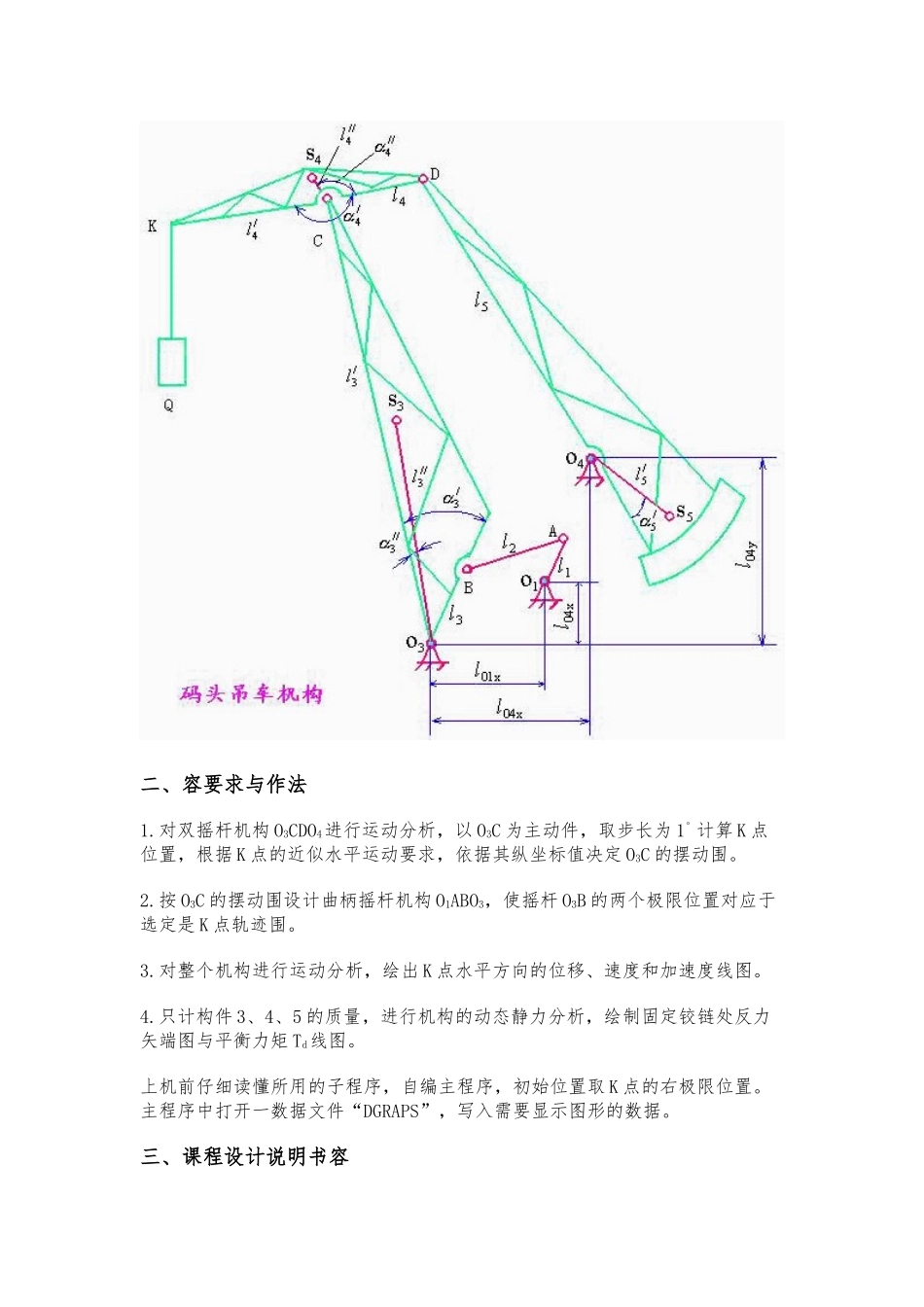
机械原理课程设计说明书题目:码头吊车机构的设计与分析 班 级 :机械 0908姓 名 : 学 号 :指导老师 : 成 绩 :2011 年 9 月 23 日目录1.设计题目 21.1 机构简图 21.2 已知条件 21.3 设计要求 32. 运动方案与机构设计 42.1 连架杆 O3C 摆动围的确定 42.2 曲柄摇杆机构尺寸的设计 73.运动分析计算与动态静力分析 83.1 整体机构运动分析 83.1.1 实虚参对比表 83.1.2 程序 83.1.3 运行结果 103.1.4 线图 103.2 整体机构动态静力分析 113.2.1 实虚参对比表 113.2.2 程序 123.2.3 线图 143.2.4 运行结果 154.主要收获 18 码头吊车机构的设计与分析 一、题目说明图示为某码头吊车机构简图。它是由曲柄摇杆机构与双摇杆机构串联成的。已知:lo1x=2.86m,lo1y=4m,lo4x=5.6m,lo4y=8.1m,l3=4m,l3'=28.525m,a3'=0.25°,l3=8.5m,´´a3=7°,´´l4=3.625m,l4 =8.35m,´a4'=184°,l4=1m,´´a4=95°,´´l5=25.15m,l5'=2.5m,a5'=24°。图中 S3、S4、S5为构件 3、4、5 的质心,构件质量分别为:m3=3500kg,m4=3600kg,m5=5500kg,K 点向左运动时载重 Q 为50kN,向右运动时载重为零,曲柄 01A 的转速 n3=1.06r/min。二、容要求与作法1.对双摇杆机构 O3CDO4进行运动分析,以 O3C 为主动件,取步长为 1°计算 K 点位置,根据 K 点的近似水平运动要求,依据其纵坐标值决定 O3C 的摆动围。2.按 O3C 的摆动围设计曲柄摇杆机构 O1ABO3,使摇杆 O3B 的两个极限位置对应于选定是 K 点轨迹围。3.对整个机构进行运动分析,绘出 K 点水平方向的位移、速度和加速度线图。4.只计构件 3、4、5 的质量,进行机构的动态静力分析,绘制固定铰链处反力矢端图与平衡力矩 Td线图。上机前仔细读懂所用的子程序,自编主程序,初始位置取 K 点的右极限位置。主程序中打开一数据文件“DGRAPS”,写入需要显示图形的数据。三、课程设计说明书容上机结束后,每位学生整理课程设计说明书一份,其容应包括:1.机构简图和已知条件2.连架杆 O3C 摆动围的确定方法与曲柄摇杆机构尺寸的设计过程。3.杆组的拆分方法与所调用的杆组子程序中虚参加实参对比表。4.自编程序中主要标识符说明。5.主程序框图。6.自编程序与计算结果清单。7.各种线图:① K 点坐标位置;② K 点水平位移、速度和加速度线图;③平衡力矩线图;④固定铰链处反力矢端图。8.以一个位置为例,用图解法对机构进行运动分析,与...