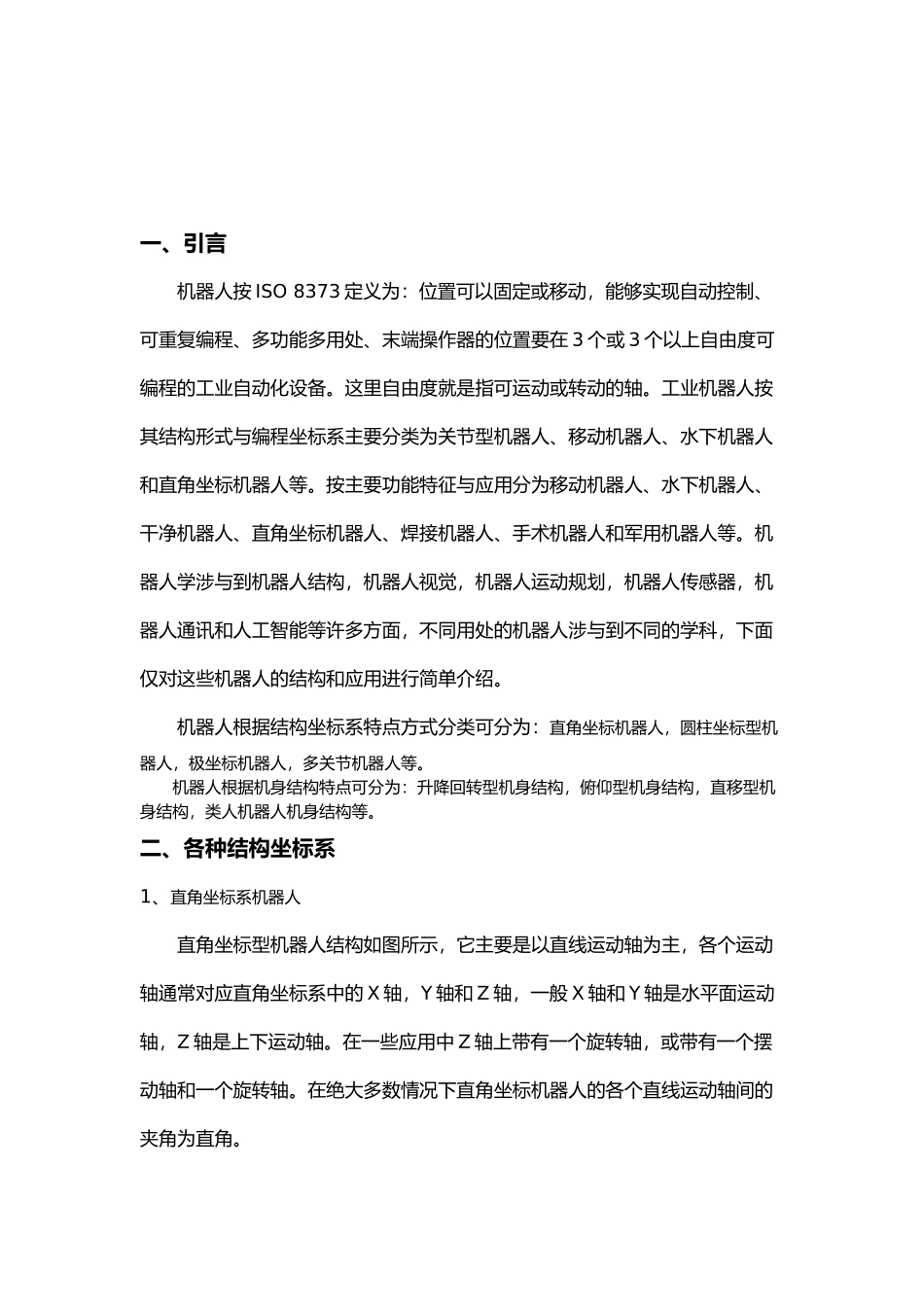
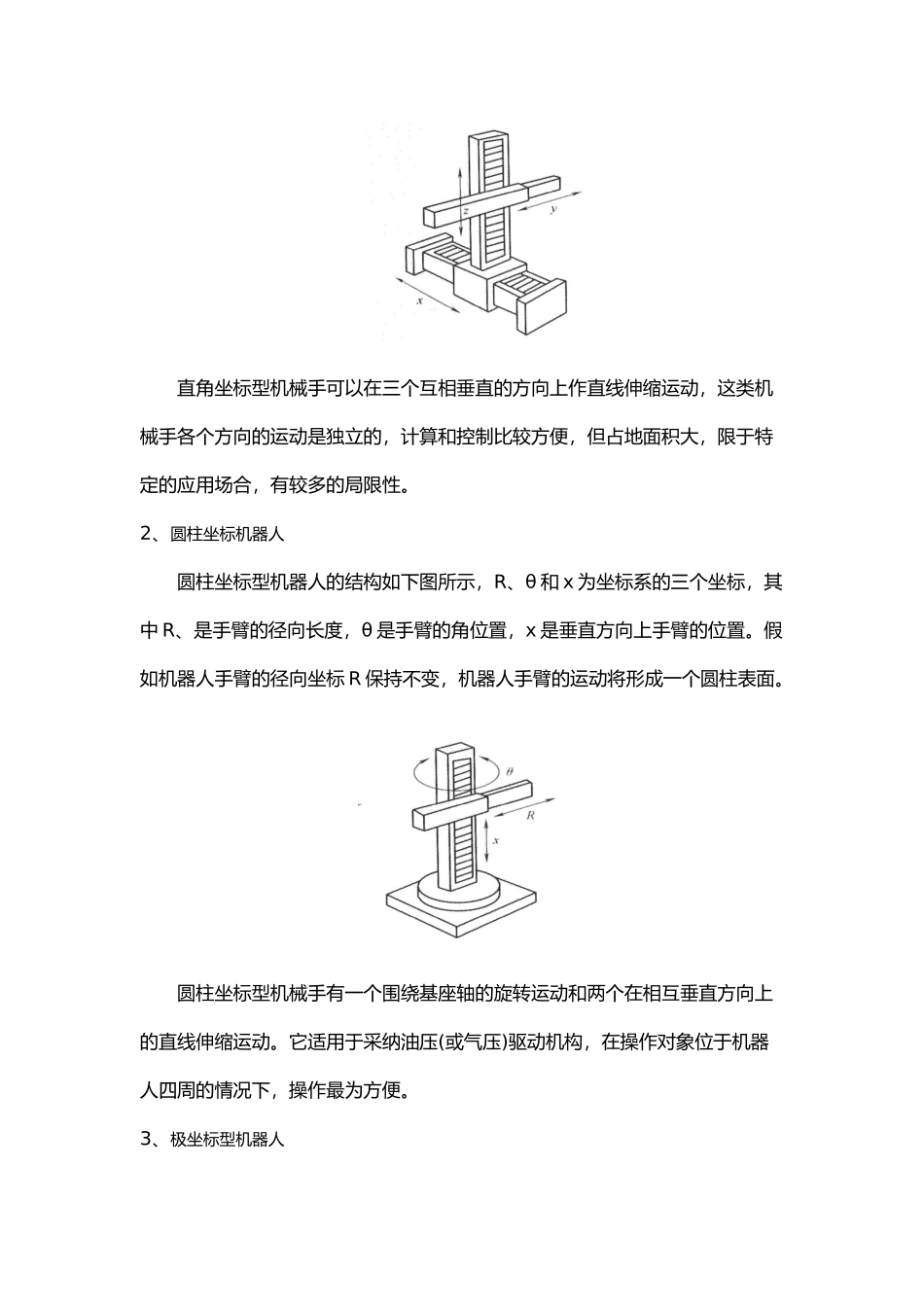
机器人的结构形式与各类结构的特点摘要:如今机器人已被广泛应用于机械、印刷机械、汽车工业、食品生产工业、药品生产工业、电子工业、机器制造业和化妆品生产等行业,不同领域因其需要的多样性和特别性,也导致机器人在结构形式上存在多样性和特别性。关键字:结构形式 ,结构坐标系73 亚辉 遥感信息工程学院一、引言机器人按 ISO 8373 定义为:位置可以固定或移动,能够实现自动控制、可重复编程、多功能多用处、末端操作器的位置要在 3 个或 3 个以上自由度可编程的工业自动化设备。这里自由度就是指可运动或转动的轴。工业机器人按其结构形式与编程坐标系主要分类为关节型机器人、移动机器人、水下机器人和直角坐标机器人等。按主要功能特征与应用分为移动机器人、水下机器人、干净机器人、直角坐标机器人、焊接机器人、手术机器人和军用机器人等。机器人学涉与到机器人结构,机器人视觉,机器人运动规划,机器人传感器,机器人通讯和人工智能等许多方面,不同用处的机器人涉与到不同的学科,下面仅对这些机器人的结构和应用进行简单介绍。机器人根据结构坐标系特点方式分类可分为:直角坐标机器人,圆柱坐标型机器人,极坐标机器人,多关节机器人等。机器人根据机身结构特点可分为:升降回转型机身结构,俯仰型机身结构,直移型机身结构,类人机器人机身结构等。二、各种结构坐标系1、直角坐标系机器人直角坐标型机器人结构如图所示,它主要是以直线运动轴为主,各个运动轴通常对应直角坐标系中的 X 轴,Y 轴和 Z 轴,一般 X 轴和 Y 轴是水平面运动轴,Z 轴是上下运动轴。在一些应用中 Z 轴上带有一个旋转轴,或带有一个摆动轴和一个旋转轴。在绝大多数情况下直角坐标机器人的各个直线运动轴间的夹角为直角。直角坐标型机械手可以在三个互相垂直的方向上作直线伸缩运动,这类机械手各个方向的运动是独立的,计算和控制比较方便,但占地面积大,限于特定的应用场合,有较多的局限性。2、圆柱坐标机器人圆柱坐标型机器人的结构如下图所示,R、θ 和 x 为坐标系的三个坐标,其中 R、是手臂的径向长度,θ 是手臂的角位置,x 是垂直方向上手臂的位置。假如机器人手臂的径向坐标 R 保持不变,机器人手臂的运动将形成一个圆柱表面。圆柱坐标型机械手有一个围绕基座轴的旋转运动和两个在相互垂直方向上的直线伸缩运动。它适用于采纳油压(或气压)驱动机构,在操作对象位于机器人四周的情况下,操作最为方便。3、极坐标...