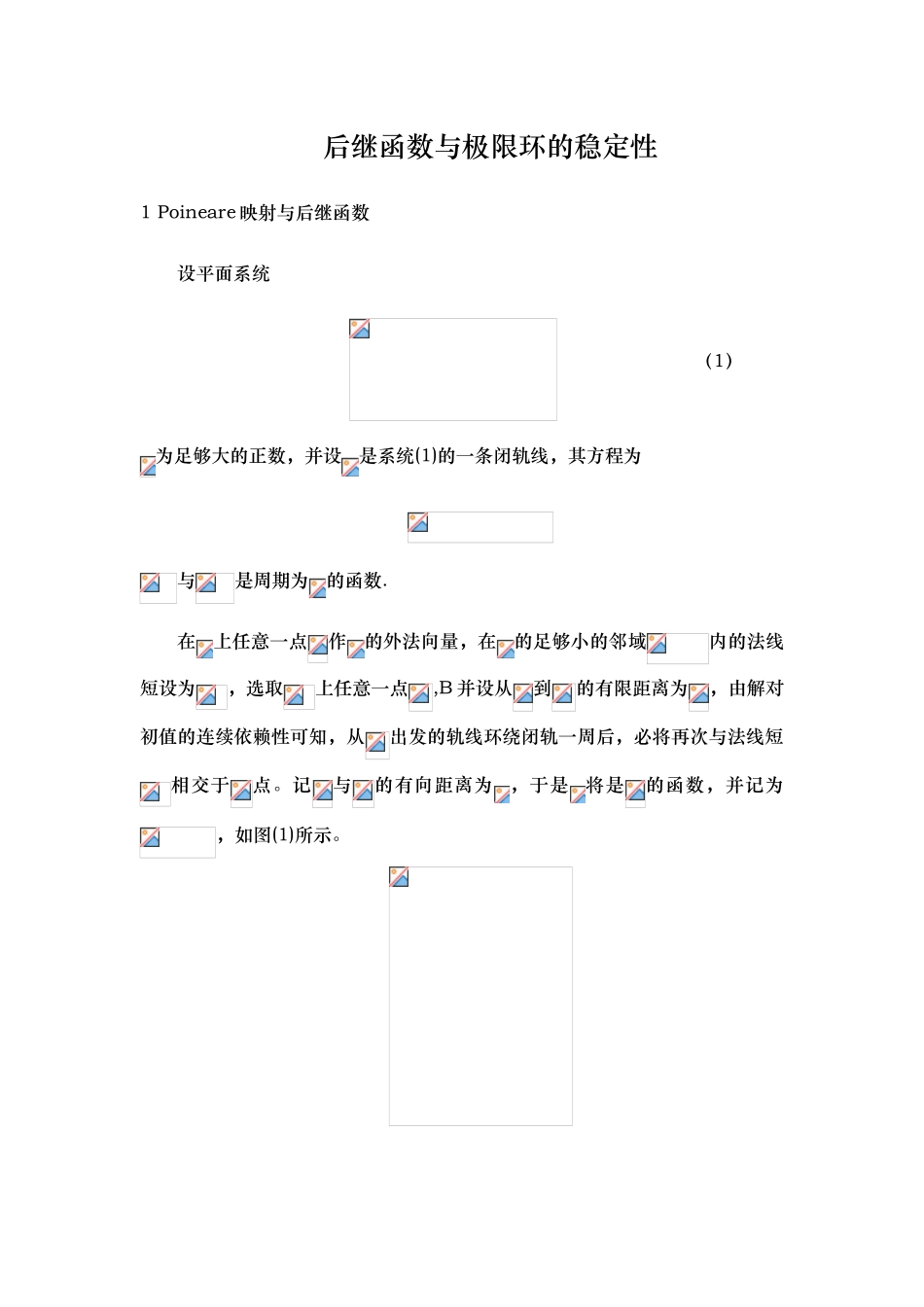
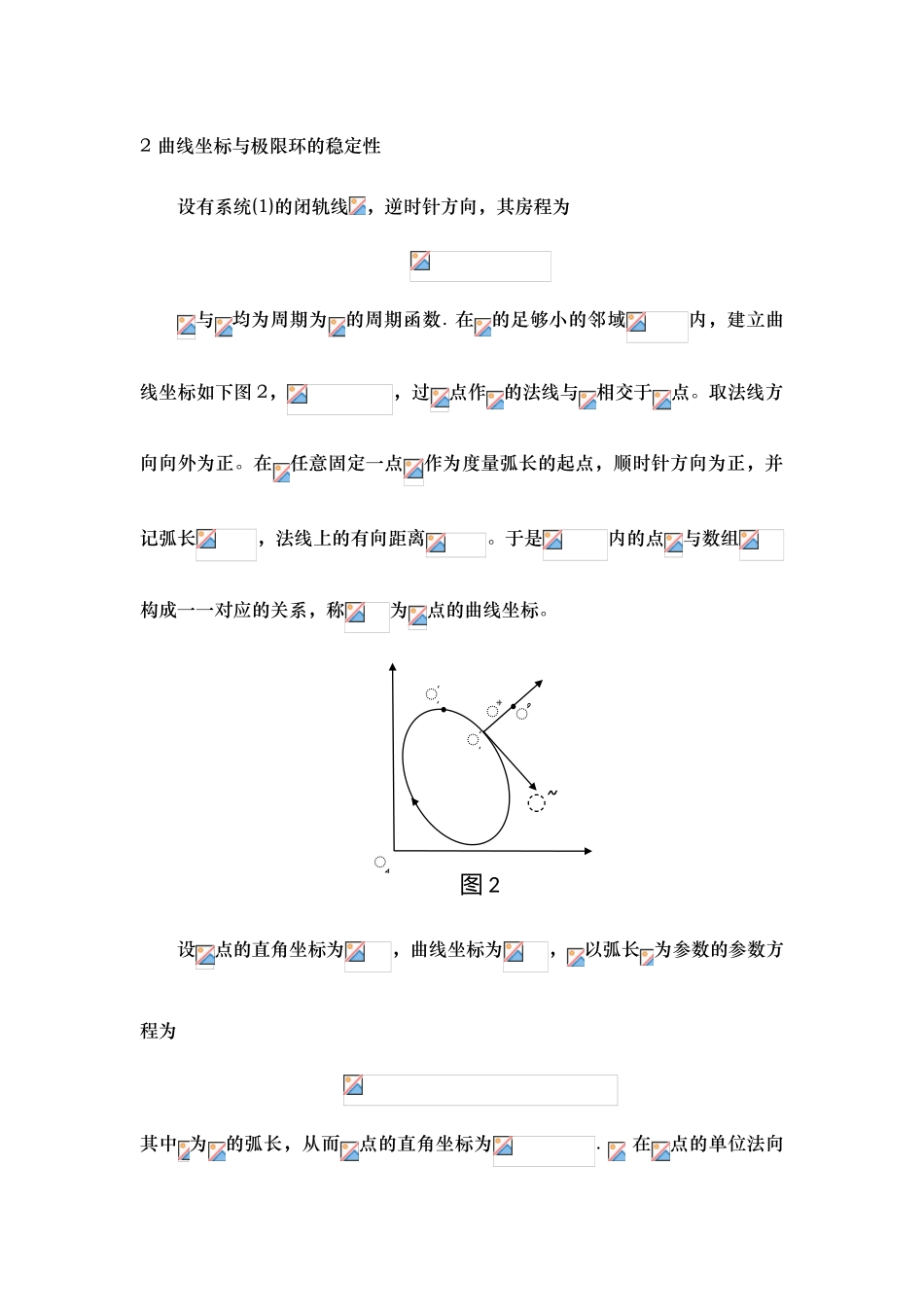
后继函数与极限环的稳定性1 Poineare 映射与后继函数设平面系统 (1)为足够大的正数,并设是系统(1)的一条闭轨线,其方程为与是周期为的函数.在上任意一点作的外法向量,在的足够小的邻域内的法线短设为,选取上任意一点,B 并设从到的有限距离为,由解对初值的连续依赖性可知,从出发的轨线环绕闭轨一周后,必将再次与法线短相交于点。记与的有向距离为,于是将是的函数,并记为,如图(1)所示。定义 1 称为的后继点; 为后继函数,有时也称为后继函数。当后继函数时,即表示过点的轨线是一条闭轨线。通过对后继函数的几何理解,很容易得出下列有关极限环稳定性的重要结论若对法线段上任意一点均有或,则为不稳定的极限环;若或,则为稳定的极限环;若,则为外稳定而内不稳定的半稳定极限环;若,则为外不稳定而内稳定的半稳定极限环;若,则为周期环。根据后继函数的零点个数,可以定义极限环的重数定义 2 若则称为重极限环。特别地,称为单重极限环或简单极限环。显然这里的重极限环对应于后继函数的重根。通过后继函数在零点泰勒展开很容易的到这个结论。2 曲线坐标与极限环的稳定性设有系统(1)的闭轨线,逆时针方向,其房程为与均为周期为的周期函数. 在的足够小的邻域内,建立曲线坐标如下图 2,,过点作的法线与相交于点。取法线方向向外为正。在任意固定一点作为度量弧长的起点,顺时针方向为正,并记弧长,法线上的有向距离。于是内的点与数组构成一一对应的关系,称为点的曲线坐标。ܲ�ܲ�ܲ�ܲ�߬�ܲ�图 2设点的直角坐标为,曲线坐标为,以弧长 为参数的参数方程为其中 为的弧长,从而点的直角坐标为. 在点的单位法向量为,于是 又由于所以可以得到直角坐标与曲线坐标的关系 (2)从而可以利用公式(2)把给定的直角坐标下的坐标转化为曲线坐标下的坐标,得到 (3)显然极限环对应于它的零解,并将上式分离出线性项得其中 (4)所以方程(3)的一次近似方程为 (5)方程(5)满足初始条件的解为从而对极限环的稳定性,有如下定理定理 1 当时极限环是稳定的;当时,极限环是不稳定的,其中 是极限环的弧长.证 对足够小邻域内的任意一点,考虑后继函数显然,当时,有,从而是稳定(不稳定)极限环。对于定理 1,里面表达式是在曲线坐标下的,用起来不方便,现在把它转化为直角坐标下的表达式,有如下定理定理 2 若沿着系统(1)的极限环有则的极限环是稳定(不稳定),其中是极限环的周期证明过程利用曲线坐标与...