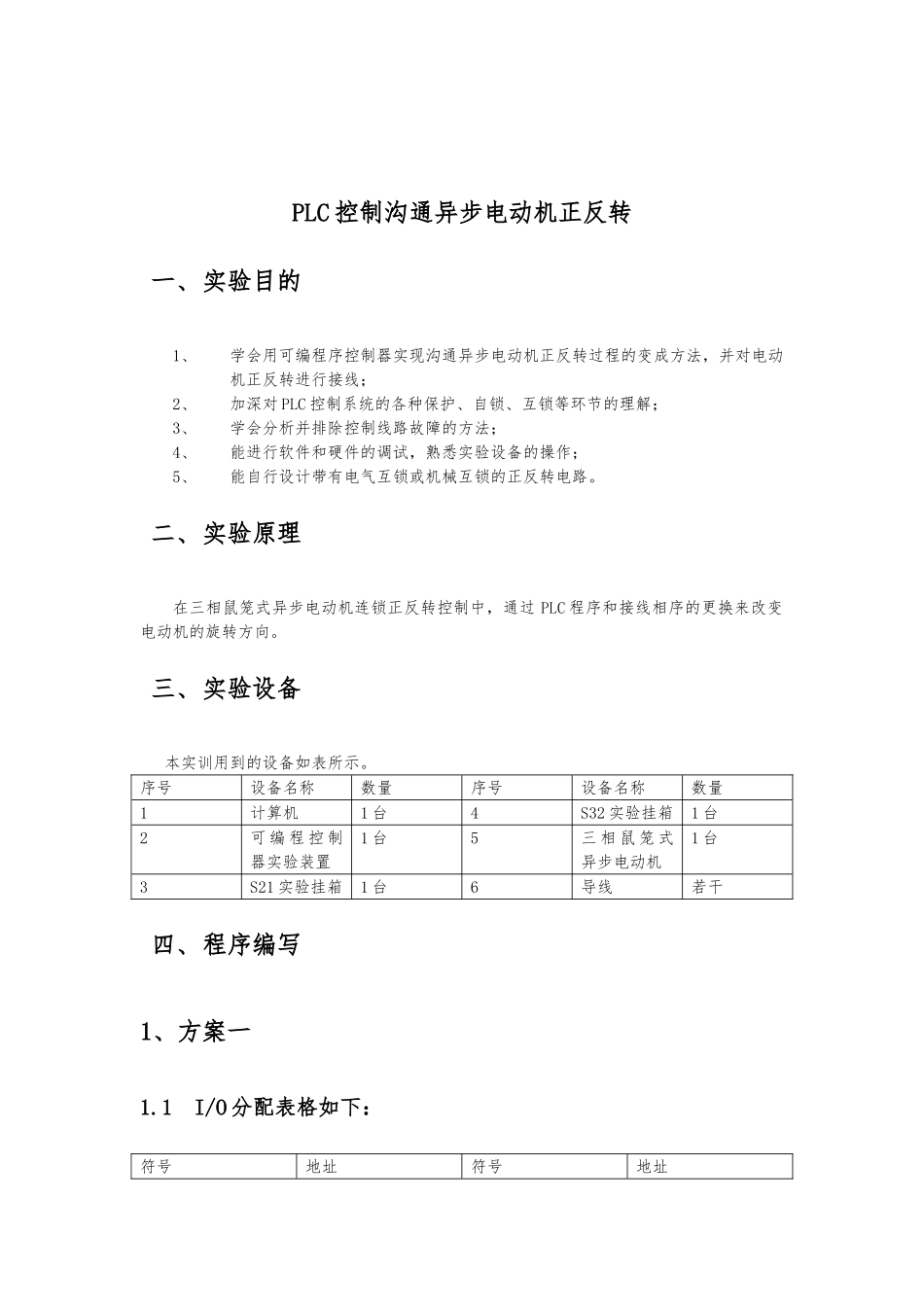
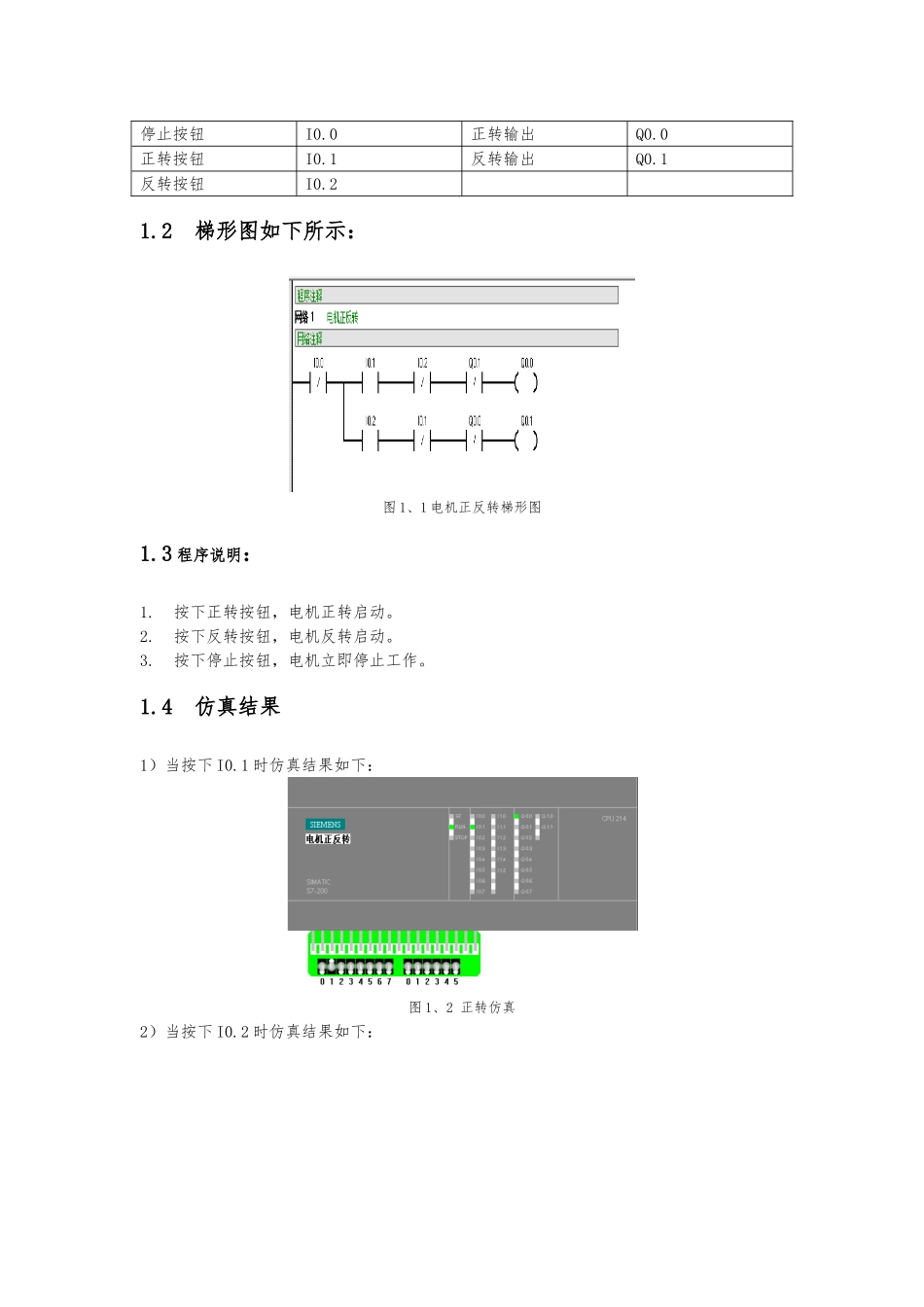
实验总结报告题目:PLC 控制沟通异步电动机正反转学院: 信息与通信工程学院指导老师: 涂兵老师专业: 自动化班级: 11 级自动化 2Bf学号: : 龙序号: 27PLC 控制沟通异步电动机正反转一、实验目的1、学会用可编程序控制器实现沟通异步电动机正反转过程的变成方法,并对电动机正反转进行接线;2、加深对 PLC 控制系统的各种保护、自锁、互锁等环节的理解;3、学会分析并排除控制线路故障的方法;4、能进行软件和硬件的调试,熟悉实验设备的操作;5、能自行设计带有电气互锁或机械互锁的正反转电路。二、实验原理在三相鼠笼式异步电动机连锁正反转控制中,通过 PLC 程序和接线相序的更换来改变电动机的旋转方向。三、实验设备本实训用到的设备如表所示。序号设备名称数量序号设备名称数量1计算机1 台4S32 实验挂箱1 台2可 编 程 控 制器实验装置1 台5三 相 鼠 笼 式异步电动机1 台3S21 实验挂箱1 台6导线若干四、程序编写1、方案一1.1 I/O 分配表格如下:符号地址符号地址停止按钮I0.0正转输出Q0.0正转按钮I0.1反转输出Q0.1反转按钮I0.21.2 梯形图如下所示:图 1、1 电机正反转梯形图1.3 程序说明:1.按下正转按钮,电机正转启动。2.按下反转按钮,电机反转启动。3.按下停止按钮,电机立即停止工作。1.4 仿真结果1)当按下 I0.1 时仿真结果如下:图 1、2 正转仿真2)当按下 I0.2 时仿真结果如下:图 1、3 反转仿真3)当按下 I0.0 时,仿真结果如下:图 1、4 停止仿真2、方案二2.1 I/O 分配表格如下:符号地址符号地址停止按钮I0.0正转输出Q0.0正转按钮I0.1反转输出Q0.1反转按钮I0.2线圈M0.02.2 梯形图如下所示:图 2、1 网络一图 2、2 网络二图 2、3 网络三2.3 程序说明:1.按下 I0.1,Q0.1 置 1 正转启动;2.按下 I0.2,Q0.2 置 1 反转启动,同时 Q0.1 复位正转停止。3.按下 I0.0,假如是正转,则 Q0.1 复位,停止正转;假如是反转,则 Q0.2 复位,停止反转。2.4 仿真结果:1)当按下 I0.1 时仿真结果如下:图 2、4 正转仿真2)当按下 I0.2 时仿真结果如下:图 2、5 反转仿真3)当按下 I0.0 时,仿真结果如下:图 2、6 反转仿真五、实验总结在本次实验中,一路设计电路,梯形图,仿真从开始的生疏到逐步的熟悉,让我学会了 step7 micro/win 软件与仿真软件的应用,同时也加深了对 PLC 控制系统的各种保护、自锁、互锁等环节的理解;学习了多种通过...