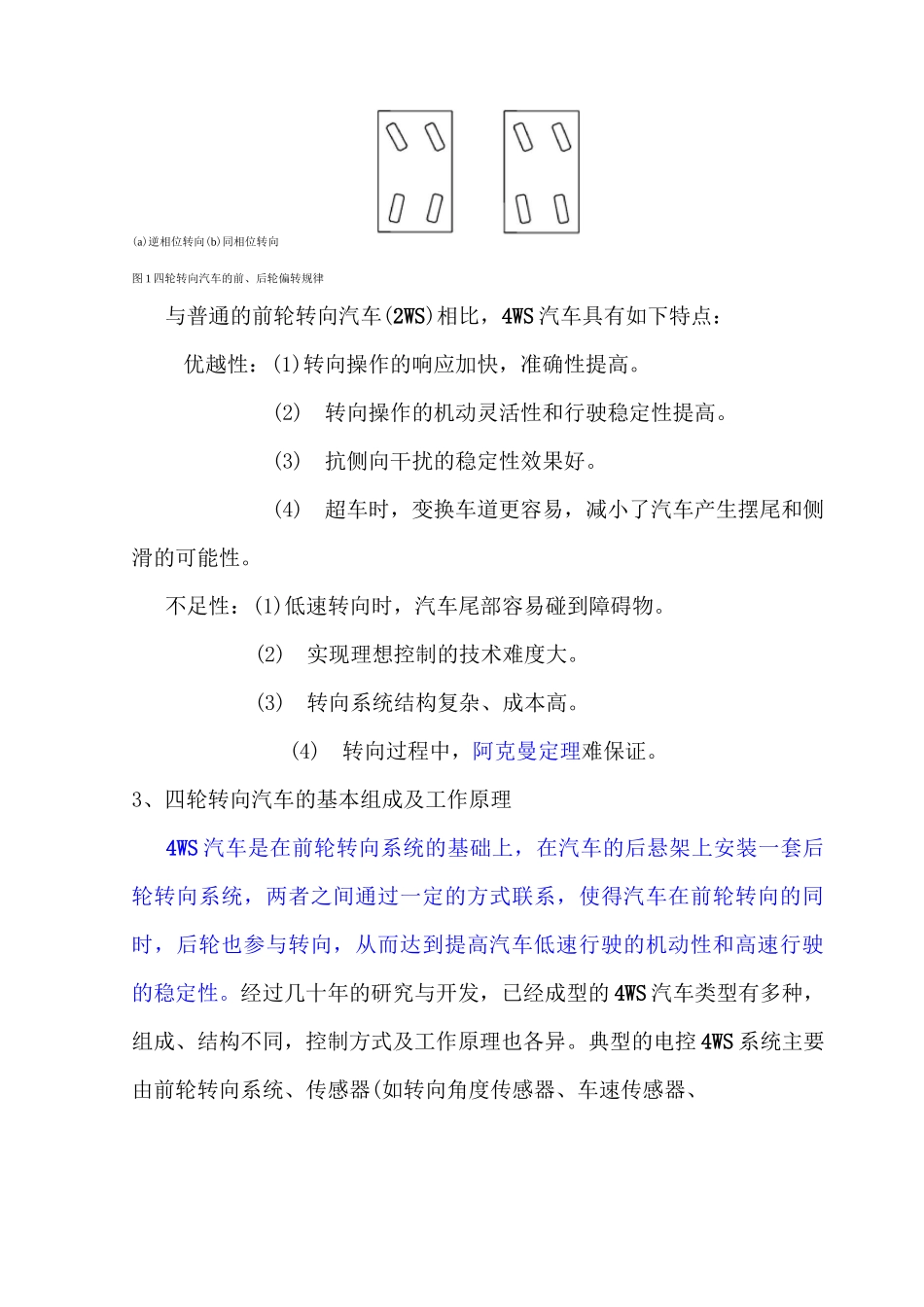
汽车四轮转向系统的研究与发展摘要:介绍四轮转向汽车的发展、构成、工作原理及类型,阐述四轮转向系统的控制策略和发展趋势,并指出四轮转向系统研究的技术难点。关键词:四轮转向;结构;工作原理;控制;发展1、前言随着现代道路交通系统和先进汽车技术的发展,汽车的主动安全技术日益受到重视。先进的主动底盘控制技术是汽车发展的重要方向,而四轮转向系统是主动底盘控制的重要组成部分。汽车的四轮转向(Four-wheelSteering4WS)是指汽车在转向时,后轮可相对于车身主动转向,使汽车的四个车轮都能起转向作用。以改善汽车的转向机动性、操纵稳定性和行驶安全性。2、汽车四轮转向技术概况从二十世纪初(1907 年),日本政府颁发第一个关于四轮转向的专利证书开始,对于汽车四轮转向的研究一直伴随着汽车工业的发展而进行着。二战期间,美国的一些军用车辆和工程车辆上采用一种前、后轮逆相位偏转的简单机械式 4WS 系统,以适应恶劣的路况,改善汽车低速转向时的机动性能。1962 年,在日本汽车工程协会的技术会议上,提出了后轮主动转向的 4WS 技术,开始了现代 4WS 转向系统的研究。在 70 年代末,本田(Honda)和马自达(Mazda)积极投入 4WS 的开发。1985 年,日本的尼桑(Nissan)在客车上应用了世界上第一例实用的 4WS 系统,应用在一种车型上的高性能主动控制悬架(HighCapacityActivety-ControlledSuspensionHICAS)上。随着对 4WS 这一领域研究的不断进展,出现了多种不同结构型式、不同控制策略的实用 4WS 系统。一般来说,4WS 汽车在转向过程中,根据不同的行驶条件,前、后轮转向角之间应遵循一定的规律。目前,典型 4WS 汽车的后轮偏转规律是:(1)逆相位转向如图 1(a)所示,在低速行驶或者方向盘转角较大时,前、后轮实现逆相位转向,即后轮的偏转方向与前轮的偏转方向相反,且偏转角度随方向盘转角增大而在一定范围内增大(后轮最大转向角一般为 5°左右)。这种转向方式可改善汽车低速时的操纵轻便性,减小汽车的转弯半径,提高汽车的机动灵活性。便于汽车掉头转弯、避障行驶、进出车库和停车场。(2)同相位转向如图 1(b)所示,在中、高速行驶或方向盘转角较小时,前、后轮实现同相位转向,即后轮的偏转方向与前轮的偏转方向相同(后轮最大转角一般为 1°左右)。使汽车车身的横摆角速度大大减小,可减小汽车车身发生动态侧偏的倾向,保证汽车在高速超车、进出高速公路、高架引桥及立交桥时,处于不足转向状态。现在,...