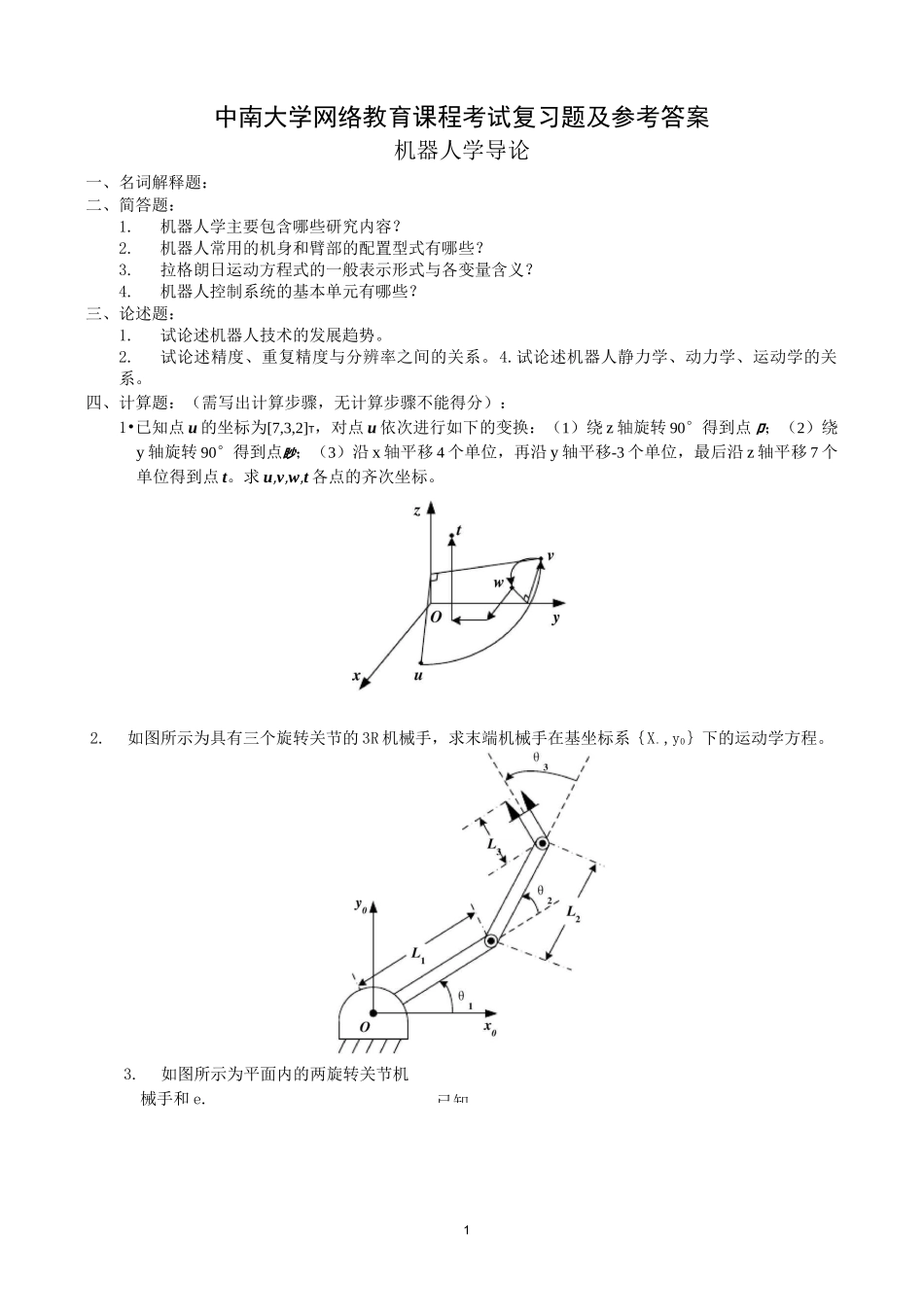
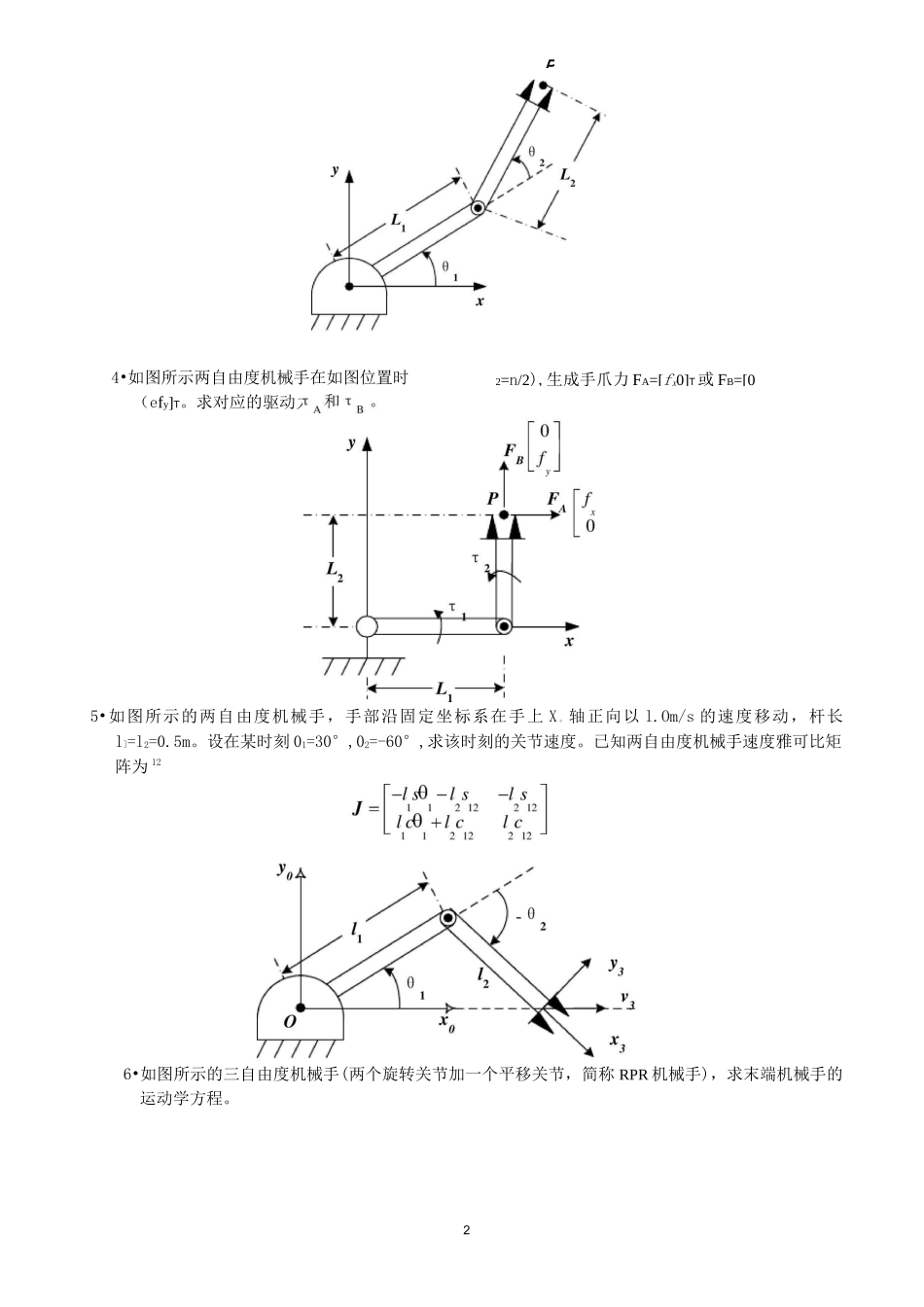
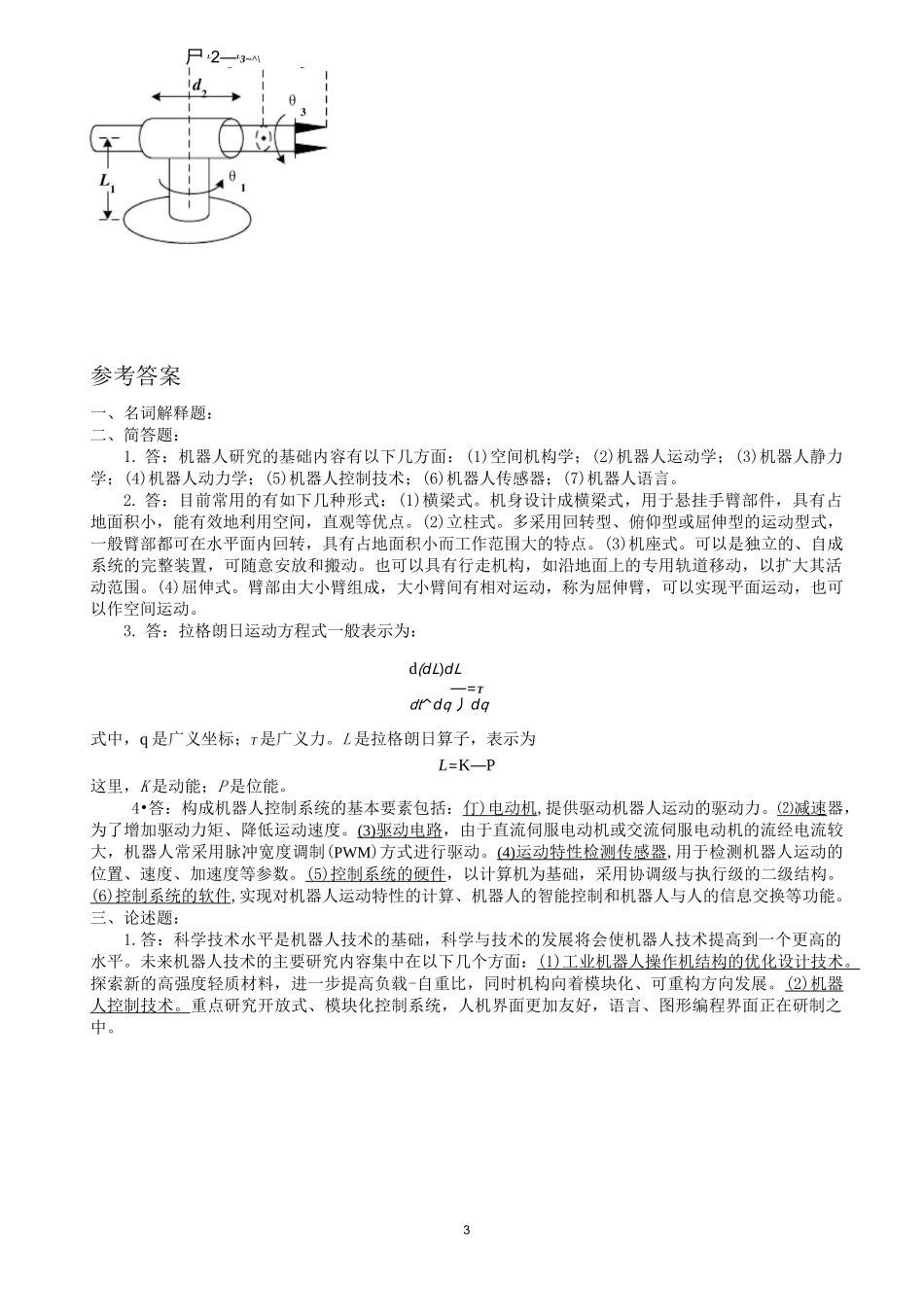
13.如图所示为平面内的两旋转关节机械手和 e.已知中南大学网络教育课程考试复习题及参考答案机器人学导论一、名词解释题:二、简答题:1.机器人学主要包含哪些研究内容?2.机器人常用的机身和臂部的配置型式有哪些?3.拉格朗日运动方程式的一般表示形式与各变量含义?4.机器人控制系统的基本单元有哪些?三、论述题:1.试论述机器人技术的发展趋势。2.试论述精度、重复精度与分辨率之间的关系。4.试论述机器人静力学、动力学、运动学的关系。四、计算题:(需写出计算步骤,无计算步骤不能得分):1•已知点 u 的坐标为[7,3,2]T,对点 u 依次进行如下的变换:(1)绕 z 轴旋转 90°得到点卩;(2)绕y 轴旋转 90°得到点眇;(3)沿 x 轴平移 4 个单位,再沿 y 轴平移-3 个单位,最后沿 z 轴平移 7 个单位得到点 t。求 u,v,w,t 各点的齐次坐标。2.如图所示为具有三个旋转关节的 3R 机械手,求末端机械手在基坐标系{X。,y0}下的运动学方程。4•如图所示两自由度机械手在如图位置时(efy]T。求对应的驱动力2=n/2),生成手爪力 FA=[fx0]T或 FB=[025•如图所示的两自由度机械手,手部沿固定坐标系在手上 X 。轴正向以 l.Om/s 的速度移动,杆长l]=l2=0.5m。设在某时刻 01=30°,02=-60°,求该时刻的关节速度。已知两自由度机械手速度雅可比矩阵为 126•如图所示的三自由度机械手(两个旋转关节加一个平移关节,简称 RPR 机械手),求末端机械手的运动学方程。P3尸 L2—L3~^\参考答案一、名词解释题:二、简答题:1. 答:机器人研究的基础内容有以下几方面:(1)空间机构学;(2)机器人运动学;(3)机器人静力学;(4)机器人动力学;(5)机器人控制技术;(6)机器人传感器;(7)机器人语言。2. 答:目前常用的有如下几种形式:(1)横梁式。机身设计成横梁式,用于悬挂手臂部件,具有占地面积小,能有效地利用空间,直观等优点。(2)立柱式。多采用回转型、俯仰型或屈伸型的运动型式,一般臂部都可在水平面内回转,具有占地面积小而工作范围大的特点。(3)机座式。可以是独立的、自成系统的完整装置,可随意安放和搬动。也可以具有行走机构,如沿地面上的专用轨道移动,以扩大其活动范围。(4)屈伸式。臂部由大小臂组成,大小臂间有相对运动,称为屈伸臂,可以实现平面运动,也可以作空间运动。3. 答:拉格朗日运动方程式一般表示为:d(dL)dL—=Tdt^dq 丿 dq式中,q 是广义坐标;T 是广义力。L 是拉格朗日算子,表示为L=K...