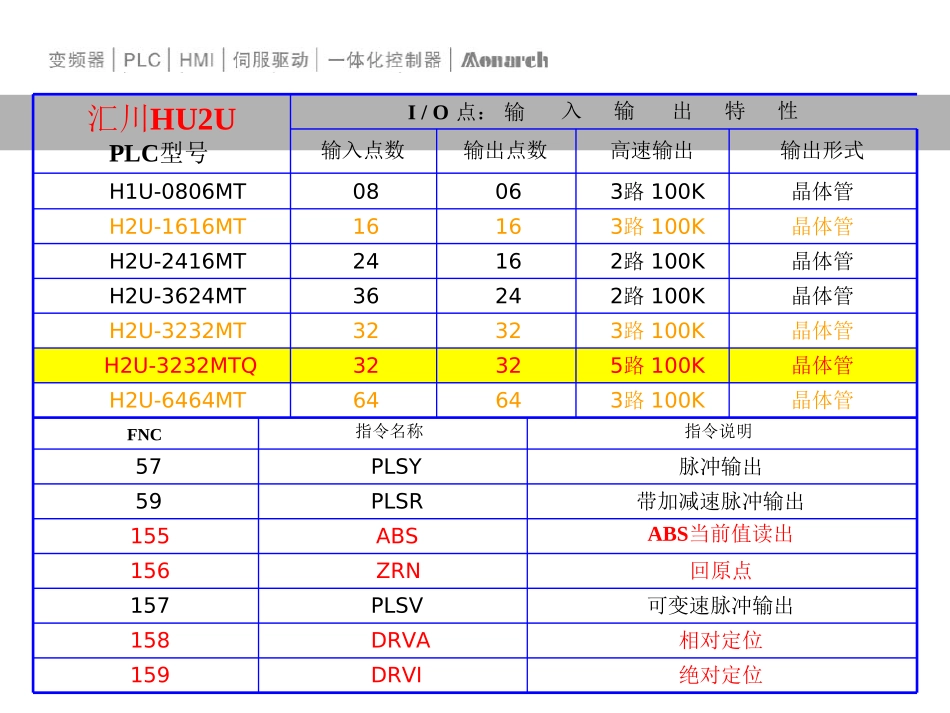
H2U系列PLC产品--外观结构汇川HU2UI/O点:输入输出特性PLC型号H1U-0806MTH2U-1616MTH2U-2416MTH2U-3624MTH2U-3232MTH2U-3232MTQH2U-6464MT输入点数08162436323264输出点数06161624323264高速输出3路100K3路100K2路100K2路100K3路100K5路100K3路100K输出形式晶体管晶体管晶体管晶体管晶体管晶体管晶体管FNC5759155156157158159指令名称PLSYPLSRABSZRNPLSVDRVADRVI指令说明脉冲输出带加减速脉冲输出ABS当前值读出回原点可变速脉冲输出相对定位绝对定位Y0脉冲口相关特殊元件端口特殊功能有效(M8135=ON)特殊功能无效(M8135=OFF)Y000运行中改脉冲个数有效运行中改脉冲个数无效加速时间D8104(默认100mS)加速时间D8148(默认100mS)减速时间D8165(默认100mS)减速时间D8148(默认100mS)偏置速度D8034偏置速度D8145最大速度D8051/D8050(默认100000K)最大速度D8146/D8147(默认100000K)输出脉冲个数累积值D8140/D8141脉冲输出停止M8145脉冲输出监控M8147Y1脉冲口相关特殊元件端口特殊功能有效(M8136=ON)特殊功能无效(M8136=OFF)Y001运行中改脉冲个数有效运行中改脉冲个数无效加速时间D8105(默认100mS)加速时间D8148(默认100mS)减速时间D8166(默认100mS)减速时间D8148(默认100mS)偏置速度D8035偏置速度D8145最大速度D8053/D8052(默认100000K)最大速度D8146/D8147(默认100000K)输出脉冲个数累积值D8142/D8143脉冲输出停止M8146脉冲输出监控M8148端口特殊功能有效(M8137=ON)特殊功能无效(M8137=OFF)Y002运行中改脉冲个数有效运行中改脉冲个数无效加速时间D8106(默认100mS)加速时间D8148(默认100mS)减速时间D8167(默认100mS)减速时间D8148(默认100mS)偏置速度D8036偏置速度D8145最大速度D8055/D8054(默认100000K)最大速度D8146/D8147(默认100000K)输出脉冲个数累积值D8150/D8151脉冲输出停止M8152脉冲输出监控M8149Y2脉冲口相关特殊元件Y3脉冲口相关特殊元件端口特殊功能有效(M8138=ON)特殊功能无效(M8138=OFF)Y003运行中改脉冲个数有效运行中改脉冲个数无效加速时间D8107(默认100mS)加速时间D8148(默认100mS)减速时间D8168(默认100mS)减速时间D8148(默认100mS)偏置速度D8037偏置速度D8145最大速度D8057/D8056(默认100000K)最大速度D8146/D8147(默认100000K)输出脉冲个数累积值D8152/D8153脉冲输出停止M8153脉冲输出监控M8150Y4脉冲口相关特殊元件端口特殊功能有效(M8139=ON)特殊功能无效(M8139=OFF)Y004运行中改脉冲个数有效运行中改脉冲个数无效加速时间D8108(默认100mS)加速时间D8148(默认100mS)减速时间D8169(默认100mS)减速时间D8148(默认100mS)偏置速度D8038偏置速度D8145最大速度D8059/D8058(默认100000K)最大速度D8146/D8147(默认100000K)输出脉冲个数累积值D8154/D8155脉冲输出停止M8154脉冲输出监控M8151脉冲定位指令新功能加减速时间可分别设置;运行中脉冲目标值可变;中断定位功能;定位完成中断;同一脉冲口多指令直接切换功能;每一个脉冲口都可以独立设置加减速时间、运行中目标值可变速度每一个脉冲口都可以独立设置加减速时间/S-ON伺服使能信号与脉冲输出之间的逻辑配合;(注意伺服本身使能时间)有效条件位M8135-位置M8139速度特殊功能有效为ON运行中目标值可变有效条件位M8135-位置M8139同一脉冲口可以实现中断定位功能、多指令直接切换速度有效条件位M8135-M8139速度中断指令既定位置量位置特殊功能有效为ON设备实际情况脉冲切换条件最好用伺服的“位置到达”信号(如在快速正反转、多动作之间的逻辑切换等)位置有效条件位M8085-M8089切换间隔使用注意事项根据设备实际情况脉冲切换条件最好用伺服的“位置到达”信号;(如在快速正反转、多动作之间的逻辑切换等)/S-ON伺服使能信号与脉冲输出之间的逻辑配合;(注意伺服本身使能时间)伺服分频输出不能直接到PLC高速输入,(三菱伺服除外);PLSR指令速度限制·速度范围10—100000Hz频率;输出频率最低值:设定频率()/[2*(加减速度时间()/1000)]输出脉冲频率的最低频率值DRVI/DRVA指令速度限制·速度范围10—100000Hz频率;输出频率最低值:最高频率()/[2*(加减速度时间()/1000)]输出...