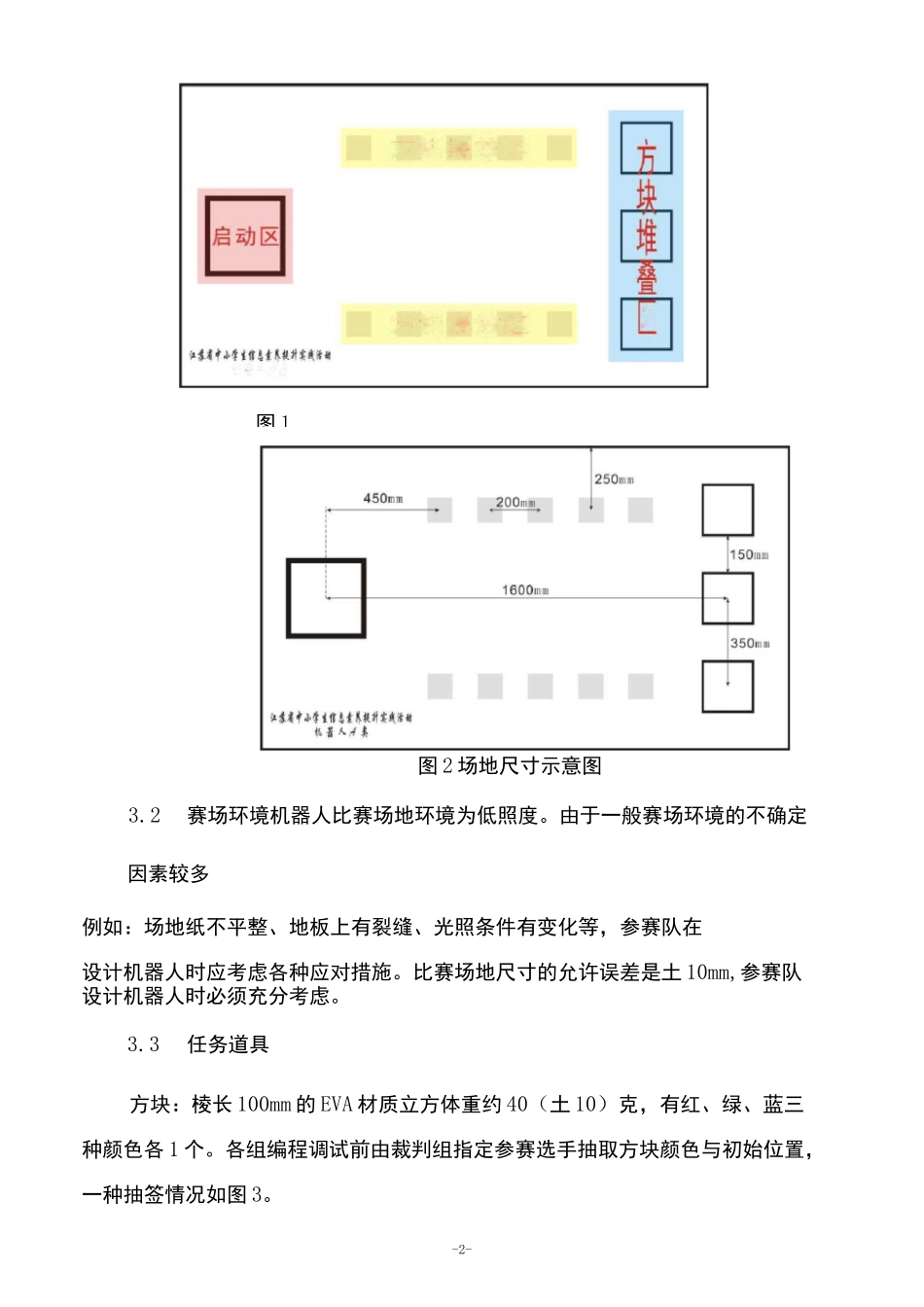
1A 类:双足人形机器人或多足仿生类机器人1 机器人界定机器人运动按照类人型(双足)或仿生类(多足)进行,不得使用轮式或履带等其他方式进行行走运动,其他外观形态无特殊要求,如图所示。2 主题简介“搬运物品”任务是模拟双足或多足机器人搬运物品的过程。考察选手对机器人步态、多关节运动等方面编程知识的掌握程度。3 场地与环境3.1 场地构成比赛场地为长方形,长宽尺寸是 2100mm*1200mm,比赛场地如平铺在地面上,四周不需要围栏,否则场地四周需有髙度为 100mm 的围挡。场地材质是喷绘布或刀刮布。为便于说明,俯视图中场地各区域添加了颜色与文字,实际场地图中各区域无色块填充与文字,如图 1、图 2 所示。-2-x方■块摆放区方块摆放区*&■八图 1图 2 场地尺寸示意图3.2赛场环境机器人比赛场地环境为低照度。由于一般赛场环境的不确定因素较多例如:场地纸不平整、地板上有裂缝、光照条件有变化等,参赛队在设计机器人时应考虑各种应对措施。比赛场地尺寸的允许误差是土 10mm,参赛队设计机器人时必须充分考虑。3.3任务道具方块:棱长 100mm 的 EVA 材质立方体重约 40(土 10)克,有红、绿、蓝三种颜色各 1 个。各组编程调试前由裁判组指定参赛选手抽取方块颜色与初始位置,一种抽签情况如图 3。-3-3.4任务描述3.4.1小学组:要求机器人须以抓取方块的方式从摆放区将一个方块(调试前抽签决定颜色与位置)送至堆叠区(调试前抽签决定位置)。机器人在启动区通过非接触方式启动(出发前机器人垂直投影不得超出启动区黑线),机器人做“挥臂”动作以示任务开始,抓取方块,移动至方块堆叠区后,机器人与方块脱离后做出“旋转一周”动作,任务完成,同时停止计时。3.4.2初中组:要求机器人须以抓取方块的方式从摆放区逐个将二个方块(调试前抽签决定颜色与位置)送至堆叠区(调试前抽签决定位置)。机器人在启动区通过非接触方式启动(出发前机器人垂直投影不得超出启动区黑线),机器人做“挥臂”动作以示任务开始,抓取方块,移动至方块堆叠区后,放下方块后继续搬运方块并进行堆叠,机器人与方块脱离后做出“旋转一周”动作,任务完成,同时停止计时。3.4.3高中组:要求机器人须以抓取方块的方式从摆放区逐个将三个方块(调试前抽签决定颜色与位置)送至堆叠区(调试前抽签决定位置)。机器人在启动区通过非接触方式启动(出发前机器人垂直投影不得超出启动区黑线),机-4-器人做“挥臂”动作以示任务开始,抓取方...