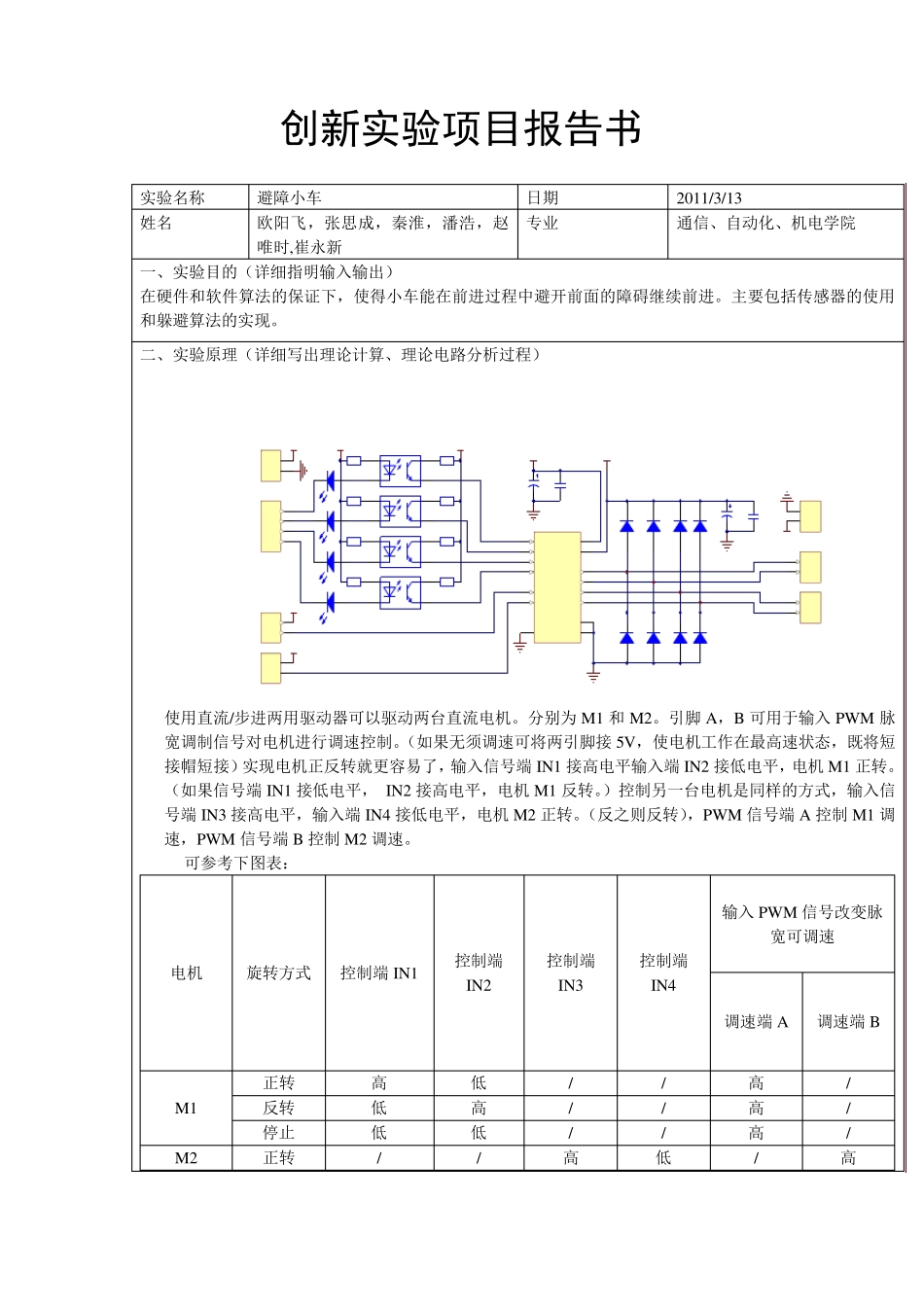
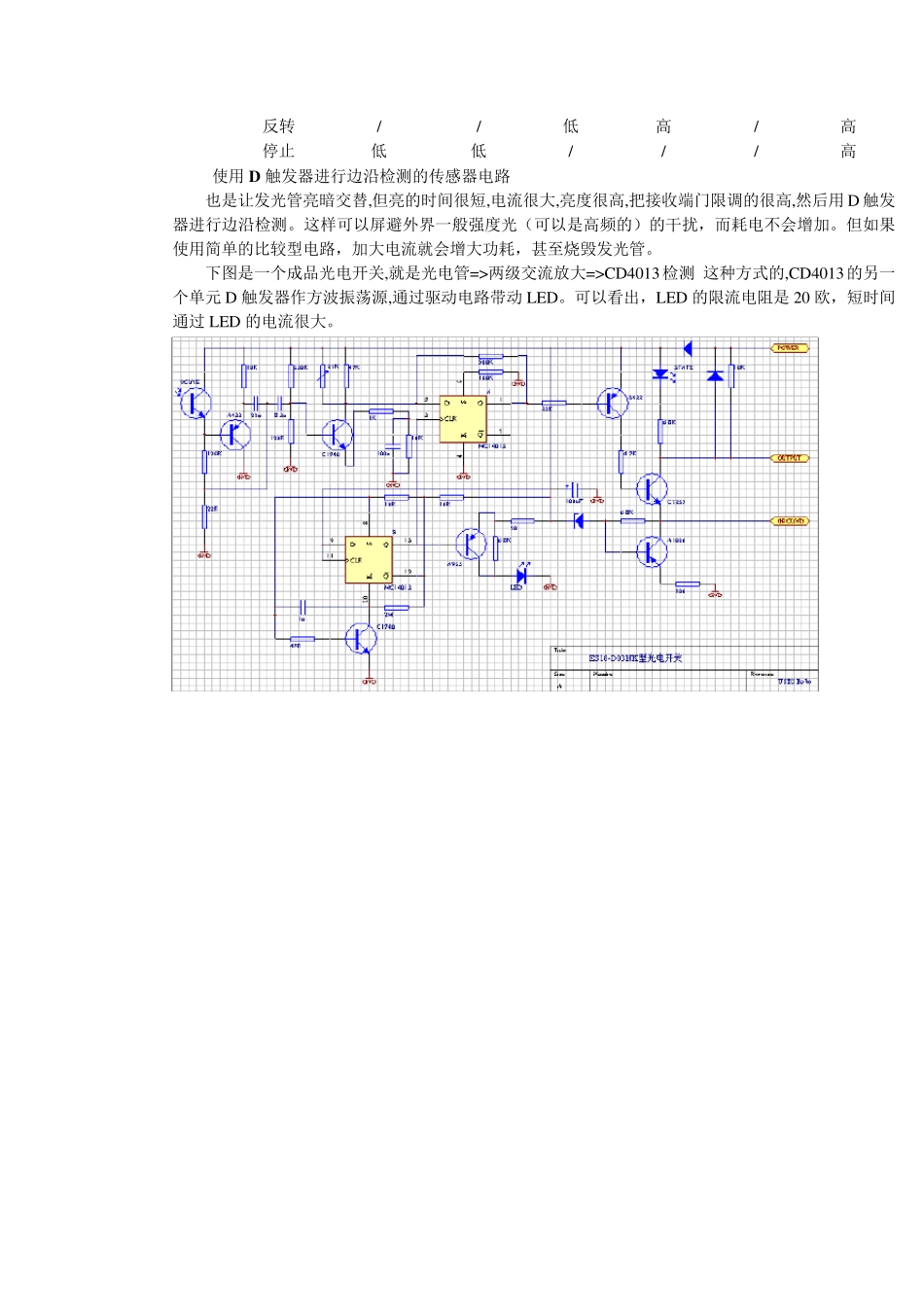
武汉理工大学 开放性实验报告 项目名称: 避障小车 实验室名称: 6 1 2 -3 6 创新实验室 学生姓名: 欧阳飞,张思成,秦淮,潘浩,赵唯时,崔永新 创新实验项目报告书 实验名称 避障小车 日期 2011/3/13 姓名 欧阳飞,张思成,秦淮,潘浩,赵唯时,崔永新 专业 通信、自动化、机电学院 一、实验目的(详细指明输入输出) 在硬件和软件算法的保证下,使得小车能在前进过程中避开前面的障碍继续前进。主要包括传感器的使用和躲避算法的实现。 二、实验原理(详细写出理论计算、理论电路分析过程) 使用直流/步进两用驱动器可以驱动两台直流电机。分别为 M1 和 M2。引脚 A,B 可用于输入 PWM 脉宽调制信号对电机进行调速控制。(如果无须调速可将两引脚接 5V,使电机工作在最高速状态,既将短接帽短接)实现电机正反转就更容易了,输入信号端 IN1 接高电平输入端 IN2 接低电平,电机 M1 正转。(如果信号端 IN1 接低电平, IN2 接高电平,电机 M1 反转。)控制另一台电机是同样的方式,输入信号端 IN3 接高电平,输入端 IN4 接低电平,电机 M2 正转。(反之则反转),PWM 信号端 A 控制 M1 调速,PWM 信号端 B 控制 M2 调速。 可参考下图表: 电机 旋转方式 控制端 IN1 控制端IN2 控制端IN3 控制端IN4 输入 PWM 信号改变脉宽可调速 调速端 A 调速端 B M1 正转 高 低 / / 高 / 反转 低 高 / / 高 / 停止 低 低 / / 高 / M2 正转 / / 高 低 / 高 反转 / / 低 高 / 高 停止 低 低 / / / 高 使用D 触发器进行边沿检测的传感器电路 也是让发光管亮暗交替,但亮的时间很短,电流很大,亮度很高,把接收端门限调的很高,然后用D 触发器进行边沿检测。这样可以屏避外界一般强度光(可以是高频的)的干扰,而耗电不会增加。但如果使用简单的比较型电路,加大电流就会增大功耗,甚至烧毁发光管。 下图是一个成品光电开关,就是光电管=>两级交流放大=>CD4013检测 这种方式的,CD4013的另一个单元 D 触发器作方波振荡源,通过驱动电路带动 LED。可以看出,LED 的限流电阻是20 欧,短时间通过 LED 的电流很大。 红外遥控有发送和接收两个组成部分。发送端采用单片机将待发送的二进制信号编码调制为一系列的脉冲串信号,通过红外发射管发射红外信号。红外接收完成对红外信号的接收、放大、检波、整形,并解调出遥控编码脉冲。为了减...






 VIP
VIP

