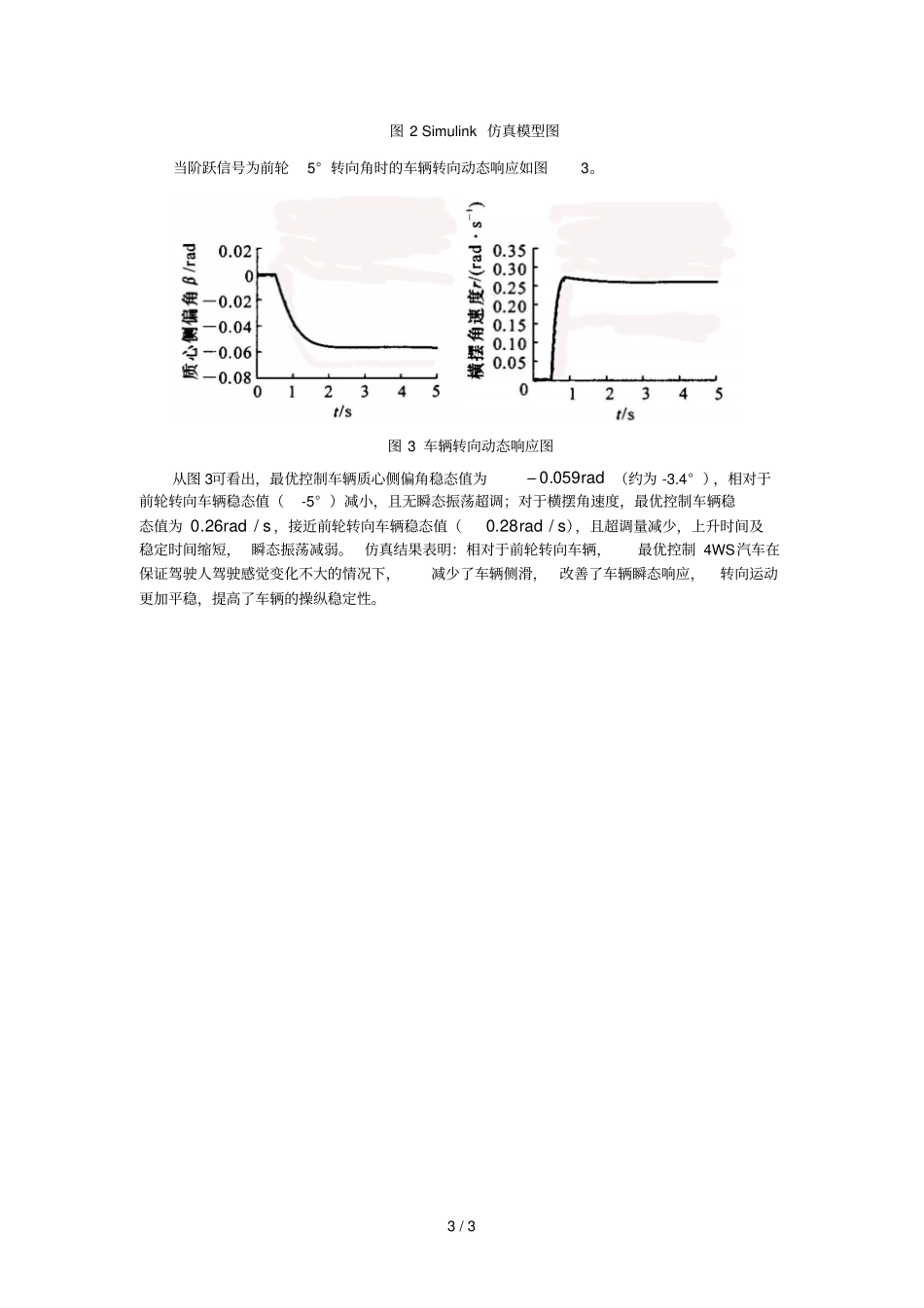
1 / 3 最优控制在四轮转向技术中应用近年来,四轮转向技术(4WS)发展迅速, 本文根据具有二次型性能指标的线性跟踪问题最优控制理论,基于车辆状态反馈和前轮前馈,简单介绍4WS 汽车转向控制规律。首先建模。 建模时以前轮转角作为输入,忽略汽车的侧倾与俯仰运动,认为汽车只作平行于地面的平面运动。建立动力学微分方程为:rIbkakrkbkaubkakrmukkrbkakukkzrfrf21221221212121)(1)()()(1)(上式中, β为质心侧偏角;r为汽车横摆角速度;u为质心前进速度;m为汽车质量 ;为汽车质心侧偏角速度; r 为汽车横摆角加速度;1k 、2k 分别为前、后轮等效侧偏刚度;a、b分别为汽车质心至前、后轴的距离;f 、r 分别为前、后轮转角;zI 为汽车绕质心的转动惯量。化为状态方程形式:CWBUAXX上式中,fr WUrXrX;;;;1112222122122121;;1zzzzIakmukCIbkm ukBuIkbkaIbkakmubkakm ukkA;采用的闭环控制系统见图1,后轮优化控制率为U ,fFFFBrKXKU上式中,FBK为状态变量反馈增益矩阵;FFK为前轮转角前馈增益矩阵,二者均为车速函数。图 1 控制系统结构为寻求最优后轮转角输入tU,应使性能指标J 取极小值。rX f车辆系统FFKFBK2 / 3 dtRUUXXQXXJTdTd0)()(21上式中,dX为理想模型, Q、R 均为加权矩阵;Q 为半正定矩阵;R 为正定矩阵。第一项是用来衡量整个控制期间系统的实际状态与给定状态之间的综合误差;第二项是对控制总量的限制,即本系统中对控制后轮转角的范围。利用变分法求解该二次型最优控制问题,考虑A、B、 Q、 R 为常数矩阵(定常系统)时, t,0tP,0t,得出黎卡提方程为:0)()(011WQAPCBPBRAQPBPBRPAPAdTTTT解得最优控制为fdTTTTPCQAABPBRBRPXBRtU)()(1111;状态变量反馈增益矩阵PBRKTFB1; 前轮转角前馈增益矩阵)()(111PCQAABPBRBRKdTTTFF用 Matlab/Simulink进行仿真分析。仿真模型见图2。具体结构参数为:kgm2996,ma4.1,mb45.1, 24987mkgI z,radNk/533621,radNk/734212。仿真时取hkm/60正常车速,则1156.33673.69618.05390.2A,3476.214704.1B,19803.140687.1C。同时令加权矩阵5,1001RQ, 则3106.00407.0FBK,8123.0FFK。3 / 3 图 2 Simulink 仿真模型图当阶跃信号为前轮5° 转向角时的车辆转向动态响应如图3。图 3 车辆转向动态响应图从图 3可看出,最优控制车辆质心侧偏角稳态值为rad059.0(约为 -3.4° ),相对于前轮转向车辆稳态值(-5° )减小,且无瞬态振荡超调;对于横摆角速度,最优控制...







 VIP
VIP
