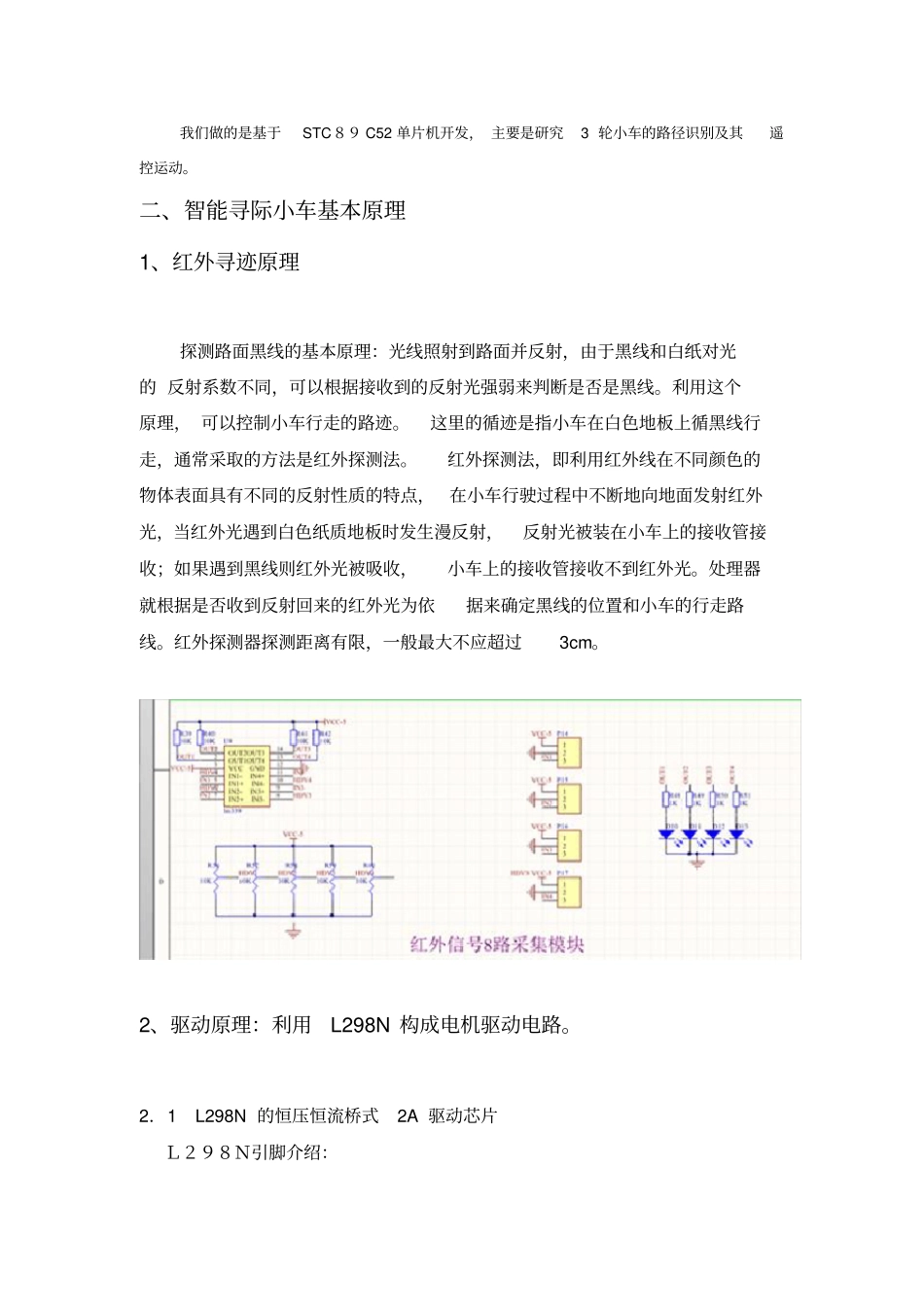
DIY 达人赛基于 STC89C52 单片机智能寻迹小车实验报告参赛队伍 : 队员:2014 年 4 月一、引言我们所处的这个时代是信息革命的时代, 各种新技术、新思想层出不穷,纵 观世界范围内智能汽车技术的发展,每一次新的进步无不是受新技术新思想的推动。 随着汽车工业的迅速发展,传统的汽车的发展逐渐趋于饱和。伴随着电子技 术和嵌入式技术的迅猛发展,这使得汽车日渐走向智能化。智能汽车由原先的驾 驶更加简单更加安全更加舒适,逐渐的向智能驾驶系统方向发展。智能驾驶系统 相当于智能机器人,能代替人驾驶汽车。它主要是通过安装在前后保险杠及两侧的红外线摄像机,对汽车前后左右一定区域进行不停地扫描和监视。计算机、电子地图和光化学传感器等对红外线摄像机传来的信号进行分析计算,并根据道路交通信息管理系统传来的交通信息,代替人的大脑发出指令,指挥执行系统操作汽车。1、来源汽车的智能化是21 世纪汽车产业的核心竞争力之一。汽车的智能化是以迅猛发展的汽车电子为背景,涵盖了控制、模式识别、传感技术、电子、电气、计算机、机械等多个学科交叉的科技。2、智能汽车国外发展情况从 20 世纪 70 年代开始,美国、英国、德国等发达国家开始进行无人驾驶汽车的研究,目前在可行性和实用化方面都取得了突破性的进展。目前日本、 欧美已有企业取得实用化成果。与国外相比,国内在智能车辆方面的研究起步较晚,规模较小, 开展这方面研究工作的单位主要是一些大学和研究所,如国防科技大学、清华大学、吉林大学、北京理工大学、长安大学、沈阳自动化所等。我国从 20 世纪 80 年代开始进行无人驾驶汽车的研究, 国防科技大学在1992 年成功研制出我国第一辆真正意义上的无人驾驶汽车。先后研制出四代无人驾驶汽车。第四代全自主无人驾驶汽车于2000 年 6 月在长沙市绕城高速公路上进行了全自主无人驾驶试验,试验最高时速达到75.6Km/h。3、我们的小车我们做的是基于STC89 C52 单片机开发, 主要是研究3 轮小车的路径识别及其遥控运动。二、智能寻际小车基本原理1、红外寻迹原理探测路面黑线的基本原理:光线照射到路面并反射,由于黑线和白纸对光的 反射系数不同,可以根据接收到的反射光强弱来判断是否是黑线。利用这个原理, 可以控制小车行走的路迹。这里的循迹是指小车在白色地板上循黑线行走,通常采取的方法是红外探测法。红外探测法,即利用红外线在不同颜色的物体表面具有不同的反射性质的特点,...






 VIP
VIP
