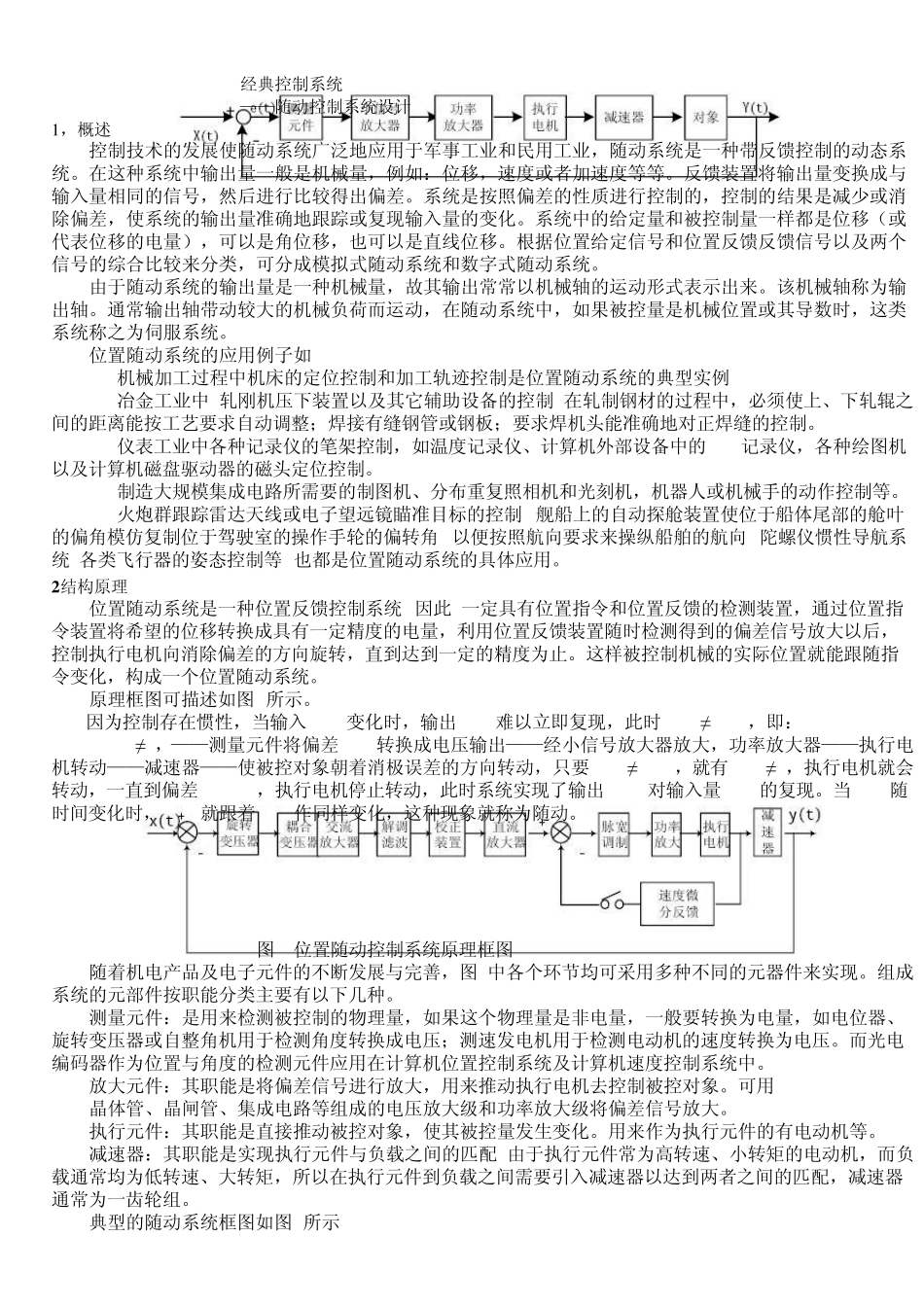
经典控制系统 ——随动控制系统设计 1 ,概述 控制技术的发展使随动系统广泛地应用于军事工业和民用工业,随动系统是一种带反馈控制的动态系统。在这种系统中输出量一般是机械量,例如:位移,速度或者加速度等等。反馈装置将输出量变换成与输入量相同的信号,然后进行比较得出偏差。系统是按照偏差的性质进行控制的,控制的结果是减少或消除偏差,使系统的输出量准确地跟踪或复现输入量的变化。系统中的给定量和被控制量一样都是位移(或代表位移的电量),可以是角位移,也可以是直线位移。根据位置给定信号和位置反馈反馈信号以及两个信号的综合比较来分类,可分成模拟式随动系统和数字式随动系统。 由于随动系统的输出量是一种机械量,故其输出常常以机械轴的运动形式表示出来。该机械轴称为输出轴。通常输出轴带动较大的机械负荷而运动,在随动系统中,如果被控量是机械位置或其导数时,这类系统称之为伺服系统。 位置随动系统的应用例子如: (1)机械加工过程中机床的定位控制和加工轨迹控制是位置随动系统的典型实例 (2)冶金工业中 轧刚机压下装置以及其它辅助设备的控制 在轧制钢材的过程中,必须使上、下轧辊之间的距离能按工艺要求自动调整;焊接有缝钢管或钢板;要求焊机头能准确地对正焊缝的控制。 (3)仪表工业中各种记录仪的笔架控制,如温度记录仪、计算机外部设备中的 x-y记录仪,各种绘图机以及计算机磁盘驱动器的磁头定位控制。 (4)制造大规模集成电路所需要的制图机、分布重复照相机和光刻机,机器人或机械手的动作控制等。 (5)火炮群跟踪雷达天线或电子望远镜瞄准目标的控制:舰船上的自动探舱装置使位于船体尾部的舱叶的偏角模仿复制位于驾驶室的操作手轮的偏转角 ,以便按照航向要求来操纵船舶的航向 :陀螺仪惯性导航系统,各类飞行器的姿态控制等,也都是位置随动系统的具体应用。 2结构原理 位置随动系统是一种位置反馈控制系统,因此,一定具有位置指令和位置反馈的检测装置,通过位置指令装置将希望的位移转换成具有一定精度的电量,利用位置反馈装置随时检测得到的偏差信号放大以后,控制执行电机向消除偏差的方向旋转,直到达到一定的精度为止。这样被控制机械的实际位置就能跟随指令变化,构成一个位置随动系统。 原理框图可描述如图1所示。 因为控制存在惯性,当输入X(t)变化时,输出Y(t)难以立即复现,此时Y(t)≠X(t),即:e(t)= Y(t)-X(t)≠0,——测量元件将偏差e(t)转换成电压输出——经小信号放大...
 VIP
VIP






