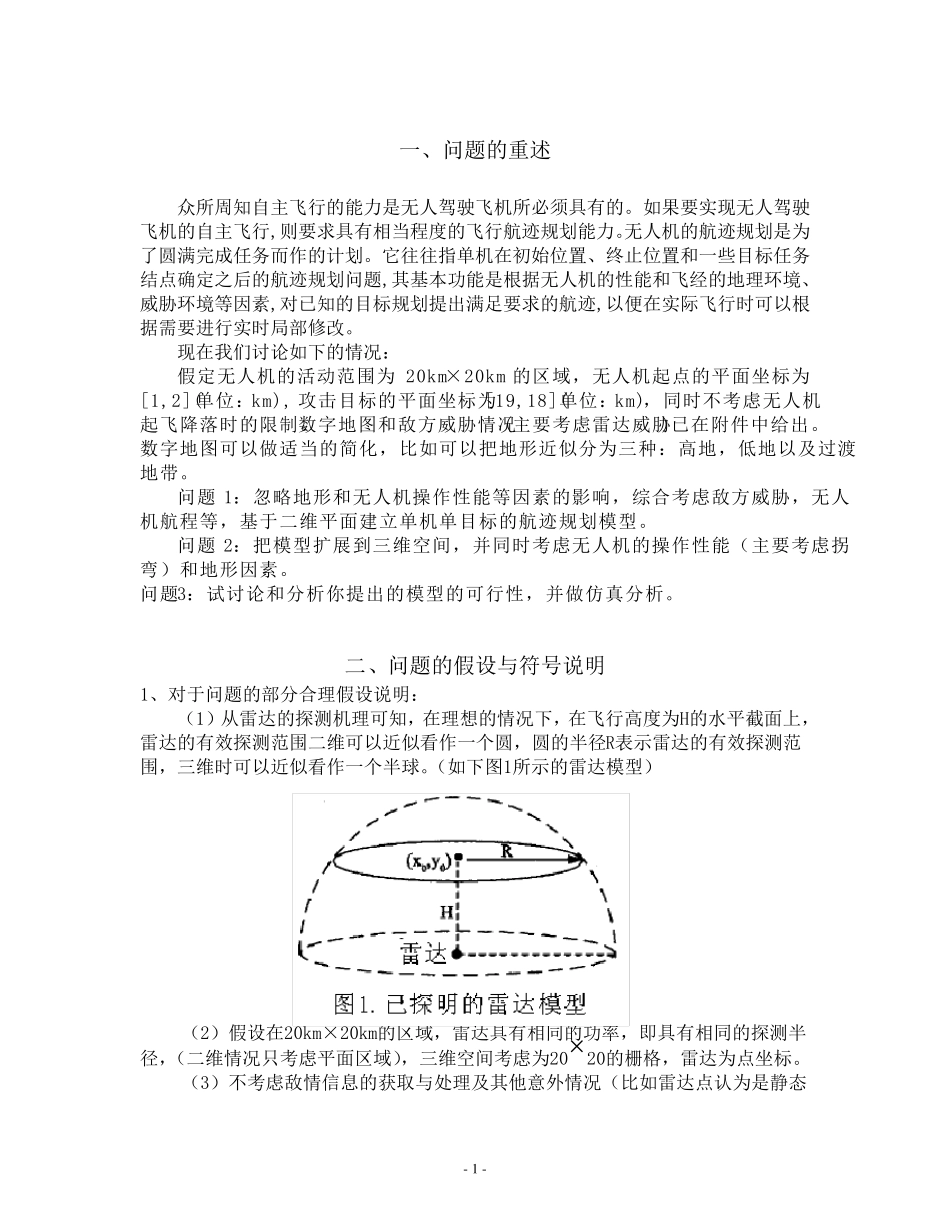
目录 一.问题重述 ....................................... 错误!未定义书签。 二. 问题的假设与符号说明.......................................... 1 1.合理假设................................................... 1 2.符号说明 .................................................................................................................... 2 三.问题的分析 ........................................................................................................................... 2 四.模型的建立与求解 ............................................................................................................. 3 1 问题一 ..................................................... 3 (一)威胁建模............................................... 3 (二)模型求解............................................... 4 (三)雷达威胁目标隶属度计算................................. 6 (四)航迹算法的规划 ……………………………………………………7 2.问题二.................................................... 11 (一)问题求解.............................................. 11 (二)基于三维空间的*A算法进行分析 ....................... 14 3. 问题三................................................... 17 (一)模型的可行性分析............................................................................................. 1 8 (二)模型及算法的仿真分析………………………………………………19 (三)模型的优缺点…………………………………………………………错误!未定义书签。20 五 参考文献 ....................................................... 21 - 1 - 一、问题的重述 众所周知自主飞行的能力是无人驾驶飞机所必须具有的。如果要实现无人驾驶飞机的自主飞行,则要求具有相当程度的飞行航迹规划能力。无人机的航迹规划是为了圆满完成任务而作的计划。它往往指单机在初始位置、终止位置和一些目标任务结点确定之后的航迹规划问题,其基本功能是根据无人机的性能和飞经的地理环境、威胁环境等因素,对已知的目标规划提出满足要求的航迹,以便在实际飞行时可以根据需要进行实时局部修改。 现在我们讨论...






 VIP
VIP

