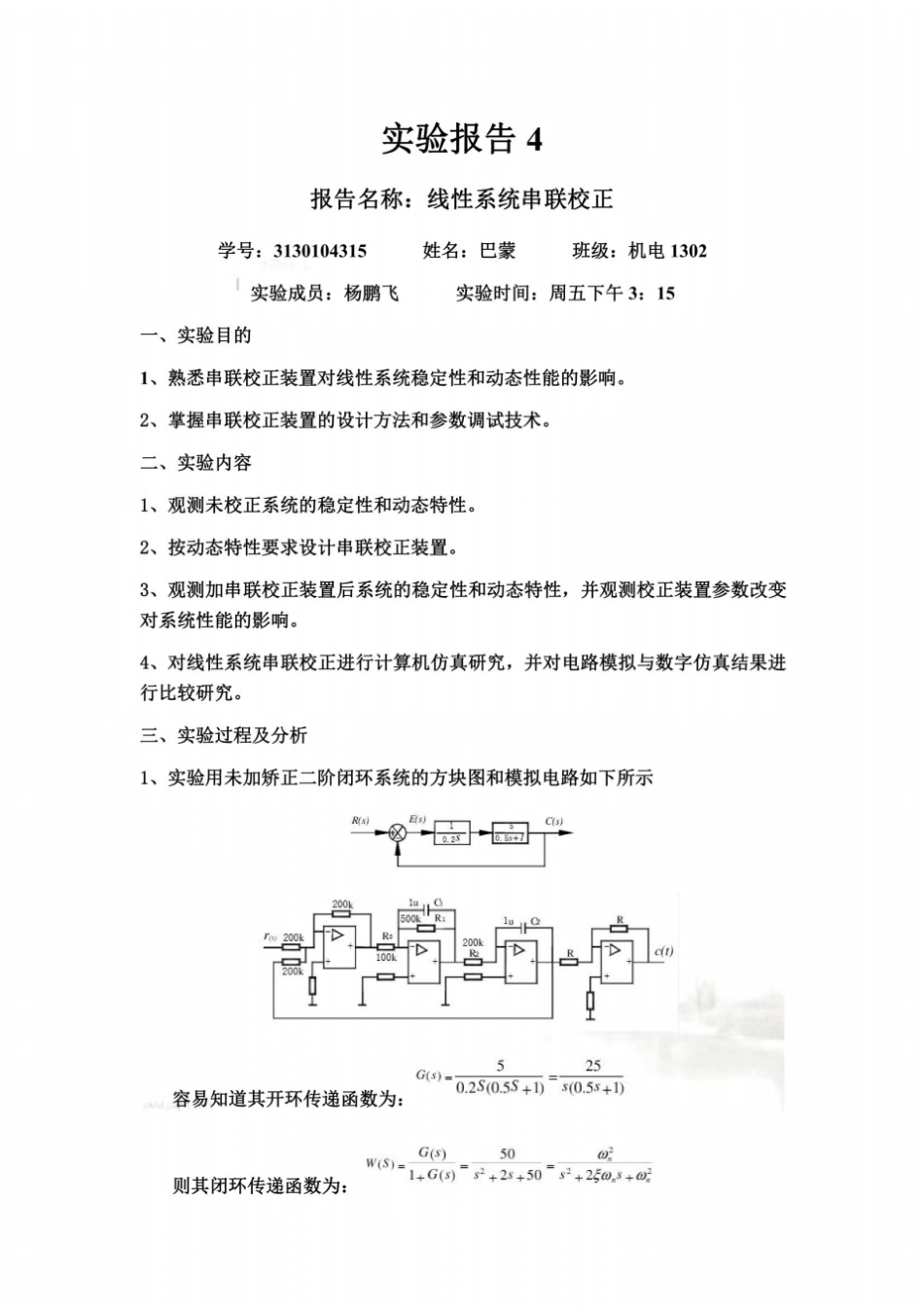
控制实验报告四线性系统串联校正式子中 ????= √50 = 7.07,ξ =1????= 0.141,因此,未加矫正装置时系统的超调量为63%,调节时间为 4s,静态速度误差系数 KV等于该Ⅰ型系统的开环增益为25,单位是 1/s 。2、串联校正的目标(1)超调量 MP≤25% (2)调节时间(过渡过程时间)t s≤1s (3)校正后系统开环增益(静态速度误差系数)KV25 1/s 3、从对超调量要求可以得到2125pMe% ,于是有0.4 。由41snts 可以得到4n。因为要求 KV25 1/s ,故令校正后开环传递函数仍包含一个积分环节,且放大系数为 25。设串联校正装置的传递函数为D( s), 则加串联校正后系统的开环传递函数为25( ) ( )( )(0.51)D s G sD sss采用相消法,令0.51( )1sD sTs(其中 T 为待确定参数),可以得到加校正后系统的闭环传递函数为2( )( )25( )1251( )( )D s G sTW sD s G sssTT对校正后二阶系统进行分析,可以得到225nT21nT综合考虑校正后的要求,取T=0.05s ,此时22.36n 1/s,0.45 ,它们都能满足校正目标要求。最后得到校正环节的传递函数为0.51( )0.051sD ss4、加校正后的模拟电路图如下所示:5、实验图像下图为未加矫正环节的实验图像(其坐标单位为1000ms/div ),可以看到系统超调量较大,调节时间很长,大概取4 格坐标格,即约为4s,最后的误差较难看出。下图是校正后的实验图像(其坐标单位为400ms/div ),可以看出系统超调量明显减小,并且在这个图像中可以估计台调节时间为1.5 格即 0.6s ,说明满足要求,校正装置起到了预期的作用。四、软件仿真未加矫正环节时:系统的开环伯德图系统的闭环伯德图系统的闭环对阶跃信号的响应加上校正环节后:校正环节的开环伯德图校正后的系统对阶跃信号的响应五、实验心得通过这次实验, 我们对线性系统的串联校正有了更深刻的了解,尤其是相消法这种校正环节的设计方式,与在理论课中老师讲授的方法不同,开拓了我们的视野。







 VIP
VIP
